


 雷达卡
雷达卡




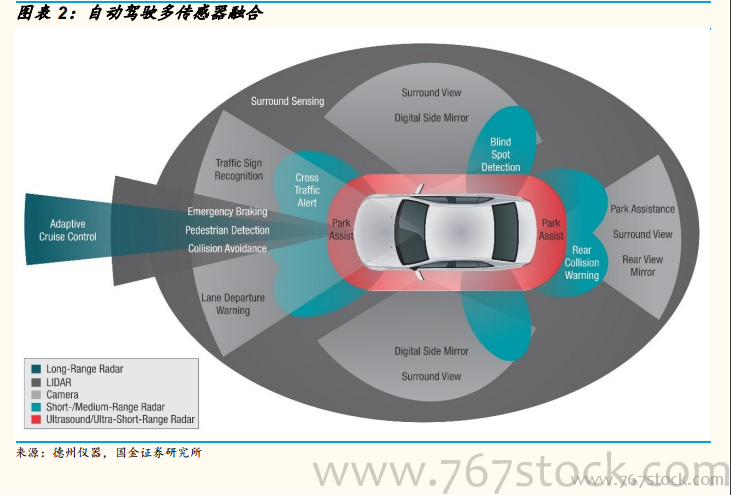
毫米波雷达:全天候工作使其不可或缺,但分辨率低,同样难以成像。相比于激光雷达,毫米波雷达技术已经非常成熟,从上世纪 90 年代开始应用于自适应巡航,2012 年英飞凌推出 24GHz 单片雷达方案,陆续拓展到 ADAS 的各个功能模块,是现阶段的主力传感器,全球出货量早已超过千万级。

摄像头:自动驾驶的眼睛识别标识、物体,但无法点阵建模、远距测距。摄像头技术最为成熟,车载应用起步最早,在 ADAS 阶段作为绝对主流的视觉传感器,根据功能不同需要 4 个到 8 个摄像头,应用在车道监测、盲点监测、障碍物监测、交通标志识别、行人识别、疲劳驾驶监测、倒车影像、360 全景影像等等。
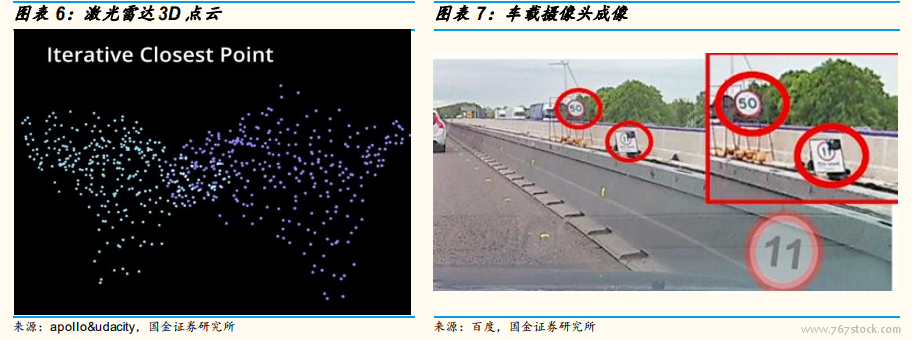
将是自动驾驶传感器的核心部分。首先,激光雷达提供生成环境的 3D 点云图像提供一系列的(x,y,z)坐标,与已有的高精度地图上的坐标进行对比,就可以很精确地做出车辆定位。同时在感知功能上,激光雷达点云图像比摄像头少了一步处理步骤(数字化),即摄像头图片需要进行数字化处理后才能由计算机进行判断物体类型等工作,而激光雷达生成的点云(实际是 TOF 数据)只需简单运算就可得到坐标数据,方便进一步的判断。
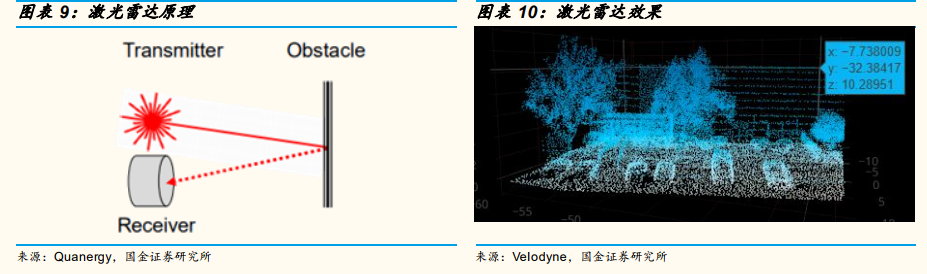
激光雷达工作原理。激光雷达(LiDAR)能释放多束激光,接收物体反射信号,计算目标与自身的距离。应用较多的是利用反射信号的折返时间计算距离(Time ofFlight),也有连续波调频(CWFM)方法。与雷达和摄像头相比,激光雷达可以通过多束激光高频发射获取的反射数据形成周边物体的高清 3D 的“点云”图像。

【免费下载】http://tinyurl.com/y8s3ecxa
【备用下载】
 自动驾驶系列报告-传感器器融合.pdf
(5 MB, 需要: 5 个论坛币)
自动驾驶系列报告-传感器器融合.pdf
(5 MB, 需要: 5 个论坛币)

 京公网安备 11010802022788号
京公网安备 11010802022788号







