


 雷达卡
雷达卡



3D超声波传感器
一、技术种类与工作原理
超声传感技术根据其工作原理和实现方式,主要分为以下几种:
- 传统单点超声波传感器:
- MEMS超声波传感器:
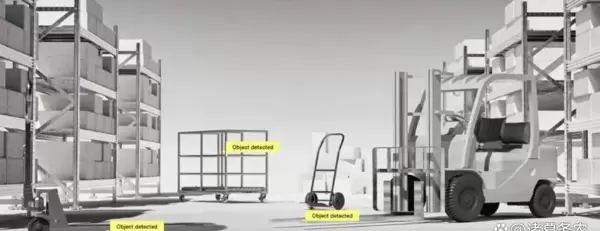
- 3D成像超声波传感器(如Sonair的ADAR):
- 声表面波(SAW)传感器:
这类传感器的工作机制基于飞行时间(ToF)原理。它通过发射超声波脉冲并接收从目标物体反射回来的信号,通过计算发射与接收之间的时间差,结合声波在空气中的传播速度(大约340m/s),可以准确计算出与目标物体的距离(距离 = 时间 × 声速 / 2)。
这种传感器的特点是技术成熟、结构简单、成本低,且不受物体颜色和透明度的影响,能够检测玻璃等透明物质。然而,它的缺点在于每次测量只能获取一个点的数据,信息密度较低。
MEMS超声波传感器代表了超声波传感技术的一个重要发展方向——芯片化和微型化。这类传感器使用晶圆级MEMS微纳工艺制造,集成了压电薄膜和硅基MEMS,单个芯片同时具备发射(Tx)和接收(Rx)的功能。
其显著特点包括体积小、功耗低、响应速度快,适用于空间受限的场景,支持大规模阵列化部署,为实现人形机器人的“超声皮肤”提供了可能性。

TDK超声波ToF传感器
3D成像超声波传感器采用了波束成形技术。通过阵列式超声换能器和高级信号处理算法,可以控制声波的方向性和干涉,实现多点扫描和感知,生成周围环境的3D点云数据。
这种传感器不仅提供三维空间信息,而且具有较大的探测范围(如180° x 180°视野),其感知能力接近低线数激光雷达,但成本相对较低。
声表面波传感器利用声波在传感器表面传播时,其速度、幅度或频率等特性随外部环境(如温度、湿度、气体浓度、压力)变化的特性来感知各种物理量。例如,深谋科技的“OmniSense”系统就是基于这一原理开发的。
这是一种多功能感知技术,单个芯片方案可以同时感知多个环境参数。某些SAW传感器甚至可以采用无线无源方式工作,即无需电源线,通过无线询问信号获取能量和读取数据,极大地简化了安装和部署。
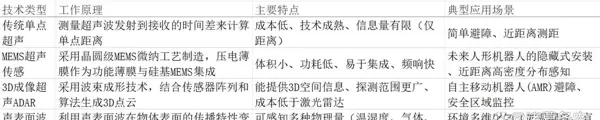
超声传感主要技术类型对比
二、在人形机器人中的应用进展
超声传感技术凭借其独特的优点,在人形机器人领域得到了广泛应用,主要包括以下几个方面:
- 避障与安全防护:
- 创新性集成方案:
- 环境与生理感知(前沿探索):
- 近距离精细操作辅助:
这是超声传感技术最典型的应用之一。超声传感器能够探测机器人周围几米内的障碍物,特别在视觉和激光雷达可能失灵的情况下(例如透明玻璃门、镜子、黑暗环境),超声传感器可以提供有效的冗余保护,避免碰撞。Sonair的ADAR传感器甚至可以提供3D安全区域监控,单个传感器就能创建一个最大5米的安全屏障。
为了降低成本并提高美观性,超声波传感器被巧妙地集成到了机器人结构中。例如,一对超声波传感器可以嵌入到人形机器人的“眼睛”部分,并通过头部的伺服电机同步旋转,实现大范围的定向扫描探测,减少传感器数量,降低系统复杂度,同时增加视觉吸引力。
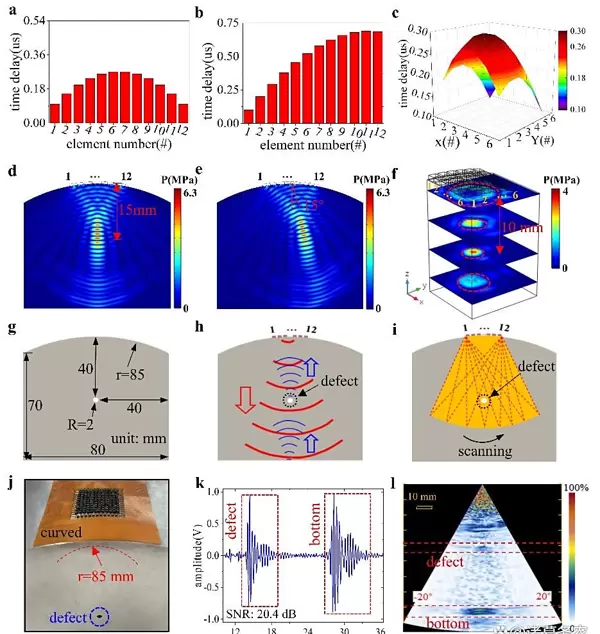
柔性可弯曲超声相控阵传感器应用
声表面波(SAW)技术扩展了超声传感的应用边界。例如,深谋科技的“OmniSense”系统使机器人不仅能够感知距离,还可以监测环境的温湿度、有害气体,甚至通过分析人体汗液和呼吸成分来进行健康评估(如血糖、血压、酒精检测)。这项技术为机器人在智能家居和老年护理领域的应用提供了新的感知维度。
由于MEMS超声波传感器体积小且易于阵列化,未来有望集成到机器人的指尖和手掌等部位,用于近距离物体识别、材质判断或抓取过程中的微距测量,作为视觉和触觉的有效补充。
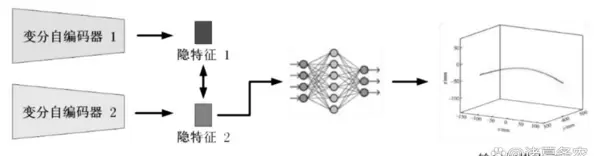
基于变分自编码器的超声扫描轨迹规划
三、不足与限制
尽管超声传感技术有许多优势,但在人形机器人中的应用仍面临一些固有的局限和挑战:
- 探测精度与分辨率限制:
- 环境干扰与误报:
- 响应速度与数据率:
- 外观集成挑战:
由于超声波的波长较长(相较于光波),这限制了其探测的绝对精度和空间分辨率,无法达到激光雷达或深度相机的细致程度。此外,测量精度容易受到环境温度、湿度和气流等因素的影响,因为声速会随着空气条件的变化而变化,需要进行相应的补偿。
超声波在空气中的传播衰减较快,因此其有效测距通常较短(传统传感器一般为数米,3D成像传感器可达5-10米)。此外,超声波容易受到其他声源噪声的干扰,如金属碰撞声、气流噪声等,可能导致测量错误或失效。强吸音材料(如绒毛、泡沫)可能会大量吸收声波能量,导致回波信号微弱或无法检测。
声波的传播速度远低于光速,因此完成一次完整测量所需的时间较长(毫秒级别),这限制了传感器的最大数据刷新率,对于高速移动的机器人来说可能稍显缓慢。
传统超声波传感器需要特定的声窗开口以确保声波的正常发射和接收,这对人形机器人的整体设计和美观性提出了挑战。然而,MEMS技术的发展有助于缓解这一问题。
3D超声波传感器的工业应用
四、关键挑战、主要发展方向及技术前沿
为了有效应对上述挑战,更好地支持人形机器人的发展,超声传感技术正在经历不断的革新。其主要的发展方向和未来趋势包括以下几个方面:
- MEMS技术与芯片化
- 3D成像与智能算法的应用
- 多模态传感器的融合
- 新材料与新功能的探索
- 标准化与生态系统建设
实现超声波传感器的小型化、成本控制和低能耗是其发展的必然趋势。其中的关键挑战在于如何确保在极小体积下传感器的敏感度、带宽和稳定性。通过采用MEMS技术,能够实现传感器的大规模生产和标准化,大幅降低制造成本,同时使得在机器人各部位广泛部署微型超声波传感器成为现实,构建出具有高分辨率的“超声皮肤”感知网络。
先进的波束形成技术等算法对于提高超声感知能力至关重要,使超声技术不仅限于“听到”,更能“看到”三维空间。这一领域的主要挑战涉及复杂的实时信号处理和计算,以及对反射信号的精准解析和噪音过滤。前沿研究集中在利用深度学习技术处理3D点云数据,实现目标识别、分类和追踪,从而增强感知系统的智能化程度。
超声传感技术通常与其他类型的传感器(如视觉、激光雷达、毫米波雷达、IMU等)协同工作,以发挥各自的优势。该领域的核心挑战在于实现不同类型传感器数据的时间和空间精确同步、校准,以及设计有效的融合算法(例如基于滤波或深度学习的方法),以便形成对环境全面且可靠的认知。例如,视觉用于识别物体类型,激光雷达用于获取精确的边界,超声波则补充透明物体检测和近程盲区覆盖,而毫米波雷达则负责速度测量和恶劣条件下的操作。
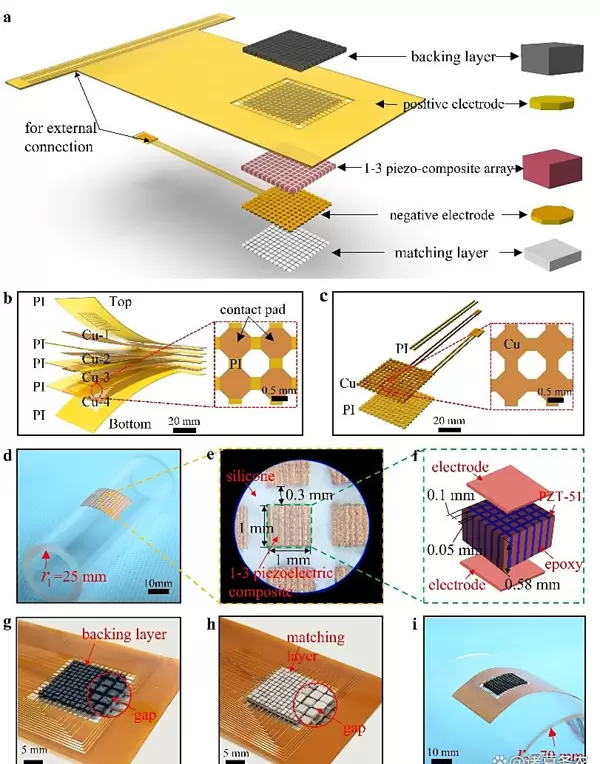
柔性可弯曲超声相控阵传感器
声表面波(SAW)传感器开辟了新的应用领域,能够不仅仅测量距离,还能感知环境的物理化学性质和生物信息。这一领域的挑战在于提高传感器的选择性、稳定性和灵敏度,以及在复杂环境下抵抗干扰的能力。最新的研究方向是开发能够同时监测多种参数(如温度、湿度、特定气体浓度、压力、生物标志物等)的多功能集成化SAW传感芯片,甚至实现自供电或无源运行,为机器人提供类似人类的多感官体验。
随着技术的进步,传感器接口、数据格式和通信协议的标准化变得日益重要,这有助于减少开发难度,推动技术创新和应用扩展。

移动机器人超声波防撞传感器
五、结论与展望
凭借其成本效益、对特定物体(如透明物)的有效检测能力和不受光线影响的特点,超声传感技术在人形机器人的近距离障碍物规避、安全保障和功能扩展中发挥着不可或缺的作用。虽然在精确度、分辨率、环境适应性和响应速度等方面仍存在一些限制,但通过MEMS芯片化、3D成像技术、智能算法以及与其他传感器的深入整合,超声传感技术正持续进步。其未来的发展趋势将是更加小型化、智能化、集成化和多样化。未来的超声波传感器可能会从单一的“眼睛”或“耳朵”转变为众多嵌入机器人外壳的微型感知单元,形成一层敏感的“皮肤”,默默地保护机器人的行动安全,并悄悄地收集周围环境的多维信息。

MEMS超声波传感器
免责声明:本文内容主要来源于公开信息和资料,部分引用了AI技术生成的内容,仅供读者参考,不作为决策依据,所有责任由使用者自行承担。

 京公网安备 11010802022788号
京公网安备 11010802022788号







