


 雷达卡
雷达卡




多机协同视觉数据采集与传输技术解析
一、立体视觉与多目视觉传感的核心机制
立体视觉(Stereo Vision)和多目视觉(Multi-View Vision)通过两个或多个摄像头从不同角度同步捕捉同一场景,利用三角测量原理分析像素间的视差,从而重建物体的三维空间信息。该类技术具备以下显著优势:
- 被动式感知能力:无需主动发射光源,完全依赖环境光照成像,隐蔽性强且能耗低。
- 丰富的视觉信息输出:可同时获取颜色、纹理等细节特征,便于后续图像识别与语义理解模块的集成。
- 硬件成本可控:以普通摄像头为核心组件,相较激光雷达等主动测距设备,在规模化应用中更具经济性。
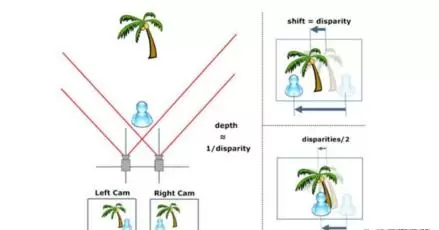
双目系统通过左右相机成像差异实现精准距离测算,是当前主流的深度感知方案之一。
二、主要技术类型及其运行机制
根据摄像单元的数量与布局方式,立体视觉技术可分为以下几种典型形式:
-
双目立体视觉(Binocular Stereo Vision)
该模式模仿人类双眼视觉结构,采用两个参数一致的相机7,以固定基线间距从略有不同的视角同步拍摄目标场景。系统通过立体匹配算法找出左右图像中的对应点,计算其水平方向上的视差值,并结合已知的焦距、基线长度等内参外参,依据三角几何关系推导出深度信息35。
特点:结构简洁,部署灵活,但对匹配算法的精度与效率要求极高,尤其在低纹理区域易出现误匹配问题。
-
多目立体视觉(Multi-View Stereo Vision, MVS)
使用三个或更多摄像头围绕目标进行多角度拍摄,获取更全面的空间观测数据。尽管基本原理仍基于视差计算,但多视角输入有效缓解了遮挡、重复纹理及弱特征区域带来的歧义性问题。
特点:能够生成更为稠密和精确的三维点云模型,提升复杂环境下的建模鲁棒性;然而也带来了更高的计算负载与硬件集成难度。
-
融合主动光源的双目/多目系统
为克服传统被动视觉在无纹理表面(如白墙、镜面)上难以匹配的缺陷,此类技术在原有相机配置基础上引入红外投影仪,投射特定编码图案(如散斑或结构光),人为增强场景纹理特征。
特点:大幅提升了弱纹理环境下的匹配成功率,增强了系统的稳定性;但由于依赖主动发光,在强日光环境下性能可能受限,整体系统复杂度亦有所上升。
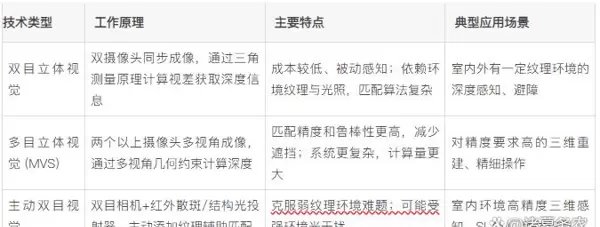
不同类型立体视觉技术在精度、适应性和成本方面各有侧重,适用于多样化的应用场景。
三、在人形机器人领域的实际应用进展
立体与多目视觉为人形机器人提供了关键的三维环境感知能力,支撑其实现自主移动、避障决策以及精细操作等功能。
-
环境感知与三维地图构建
借助立体或多目视觉系统,机器人可实时获取周围环境的高密度点云数据,用于SLAM(同步定位与建图)。例如蓝芯科技研发的3D视觉SLAM无人叉车,相比传统2D激光方案,在空旷、动态变化环境中表现出更强的适应性。其所生成的稠密点云地图不仅信息丰富,且局部环境变动不易影响定位稳定性。
-
动态避障与安全路径规划
通过持续获取前方空间的深度图,机器人能有效识别静止与运动障碍物,并据此调整行进路线。立体视觉提供的轮廓与距离信息使避障行为更加智能和平滑。以蓝芯Eagle-M3视觉传感器为例,其视场角达109°×92°,具备良好的抗环境光干扰能力,支持悬空、低矮及动态障碍物检测,已广泛应用于AMR产品中。
-
末端执行器的目标识别与精密操控
对于人形机器人的灵巧手部而言,立体视觉可用于精确估计目标物体的六自由度姿态(6D Pose),指导抓取动作。在近距离作业时,高分辨率立体系统可提供细腻的三维轮廓与位置信息,满足插接、装配等高精度任务需求。类似地,易福门O3D303或O3R222等3D ToF相机(虽非严格意义上的立体视觉,但属于广义3D视觉范畴)可输出高质量点云,适用于托盘或货物的姿态检测与精确定位。
-
多传感器融合策略
在真实场景中,立体或多目视觉通常与其他传感器协同工作。例如与IMU结合形成视觉-惯性里程计(VIO),显著提高位姿估计的连续性与抗干扰能力;也可与激光雷达、毫米波雷达进行数据级或特征级融合,弥补各自在测距范围、精度或环境适应性方面的短板,构建更全面可靠的感知体系。

一种高效简洁的多视角3DGS重建方法,展示了视觉系统在三维建模中的先进能力。
四、现存挑战与技术局限
-
对环境光照高度敏感
由于依赖自然光照成像,立体视觉系统在极端光照条件下表现不稳定。过强光线可能导致图像过曝,而昏暗环境则降低信噪比,影响特征提取与匹配效果。此外,光照方向突变也会导致同一物体在不同时间成像差异显著,增加算法处理难度。
-
计算资源消耗大
立体匹配过程涉及大量像素级相关性运算,尤其在高分辨率或多视角配置下,实时处理需要强大的算力支持。这对嵌入式平台的功耗、散热和延迟控制提出了严峻挑战,限制了其在小型化机器人上的广泛应用。
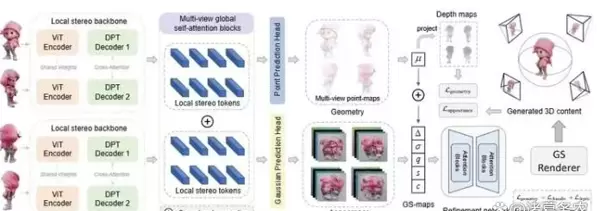
可泛化的多视角立体3DGS重建模型,代表了当前三维视觉重建的发展趋势。
立体与多目视觉传感技术通过模拟人类双眼的视差原理,为机器人提供了被动式、低成本且信息丰富的三维环境感知能力,是实现自主导航与智能交互的重要基础。尽管该技术在实际应用中面临诸多挑战,但随着算法优化、硬件升级和多传感器融合的发展,其性能正持续提升,逐步向更高效、鲁棒和智能化方向演进。
由于该方法完全依赖视觉信息进行逐像素匹配,因此对图像中的纹理特征有较强依赖。在缺乏明显纹理或视觉特征的场景下(例如天空、白墙、沙漠等单调区域),图像匹配过程容易出现误差甚至失败,导致深度估计不可靠。这种局限性限制了其在特定环境下的适用性。
此外,双目系统的精度高度依赖于摄像头之间的精确标定。长时间运行或受到外部震动后,相机间的相对位置可能发生微小偏移(即基线变化),从而影响深度计算的准确性,必须重新校准以维持系统稳定性。这对其长期使用的可靠性和维护成本提出了更高要求。
测量范围也受到硬件结构的制约:基线越长,可探测的距离越远;基线越短,则适合近距离测量。因此,在设计设备时需在测距能力与整体体积之间做出权衡,难以同时满足大范围与小型化的需求。
从计算层面来看,为提升匹配结果的鲁棒性,通常需要引入大量误匹配剔除机制,导致算法复杂度显著上升。这类高计算负载对嵌入式平台的处理器算力构成挑战,可能带来功耗增加和实时性下降的问题,进一步加大了商用落地的难度。
重点难点与主攻方向
1. 算法优化与人工智能融合
当前主流趋势是将深度学习应用于立体匹配任务中。基于海量数据训练的模型(如GC-Net、PSMNet、RAFT-Stereo等)能够有效应对弱纹理、反光、重复图案等传统方法难以处理的场景,显著提升匹配精度、速度与鲁棒性。未来研究聚焦于构建更高效的网络架构,并推动轻量化模型的发展,以便在资源受限的嵌入式设备上实现实时深度推理。
2. 硬件性能提升与专用芯片研发
采用高性能图像传感器(如全局快门、高动态范围HDR传感器)有助于改善成像质量,减少运动模糊和曝光异常对匹配的影响。同时,开发面向立体视觉核心算法的专用处理芯片(ASIC)或FPGA方案,可通过硬件加速实现低延迟、低功耗的实时处理,成为突破算力瓶颈的关键路径。
3. 多传感器深度融合
单一传感器存在固有缺陷,融合多种模态的数据已成为必然趋势。例如:
- 结合IMU构成视觉惯性里程计(VIO),利用IMU的高频响应弥补视觉在快速运动中的滞后问题,同时用视觉观测校正IMU的漂移误差;
- 融合激光雷达数据,借助其精准的绝对距离测量辅助立体视觉进行尺度恢复和深度验证,而视觉则提供丰富的语义与纹理信息。
研究重点在于发展先进的融合算法,如基于卡尔曼滤波、因子图优化或深度学习的方法,力求实现“1+1>2”的感知增益。
4. 系统级创新与主动光源技术
针对弱纹理环境的匹配难题,主动双目视觉(如双目散斑结构光)通过投射不可见光斑图案人为增强场景纹理,从根本上提升匹配可靠性。同时,优化光学系统与光源设计,有助于提高系统在强光、逆光等复杂室外环境下的抗干扰能力。
5. 前沿学术探索方向
无监督与自监督学习致力于降低对昂贵真值深度标签的依赖,使模型能直接从未标注视频流中学习深度结构,大幅减少数据采集与标注成本。
在动态多视角场景处理方面,新兴框架如Stereo-GS利用立体骨干网络提取局部图像特征,并通过全局注意力机制融合多视角信息,实现无需姿态先验的3D高斯泼溅(3DGS)重建,提升了重建效率与实用性。
此外,将神经渲染技术(如NeRF)与SLAM系统结合,正在推动高保真地图构建与场景理解的新范式。
发展趋势展望
- 智能化:AI将深度渗透至立体视觉全流程,涵盖特征提取、匹配策略、深度预测与后处理优化;
- 芯片化:专用视觉处理芯片将成为标配,显著提升运算效率并降低能耗;
- 融合化:与IMU、激光雷达、毫米波雷达等传感器的深度融合将成为应对复杂工况的标准配置;
- 实时高精度:随着算法与硬件协同进步,生成高分辨率、高精度的实时深度图将逐步成为现实。

 京公网安备 11010802022788号
京公网安备 11010802022788号







