


 雷达卡
雷达卡



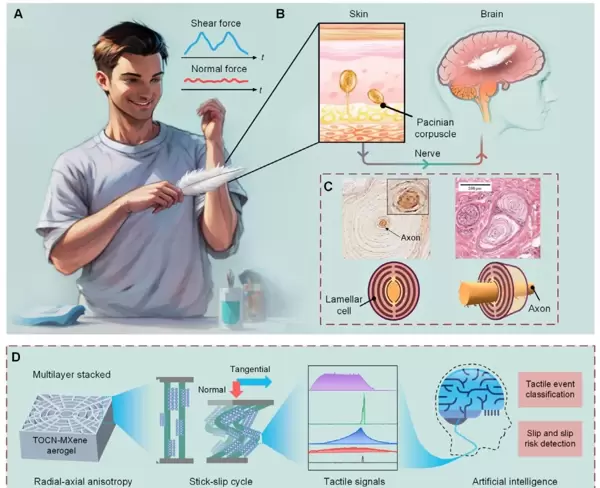
人类触觉感知系统(HTPS)中的帕西尼小体(PCs)是位于深层皮肤的机械感受器,对频率高于40–50 Hz的振动尤为敏感,其最敏感响应频率约为200 Hz。这类感受器能够将复杂的多维机械刺激——包括法向与切向力——转化为电信号,是实现粘滑感知和往复滑动识别的关键结构。受此生物机制启发,研究人员致力于开发具备类似功能的人工触觉传感器。
然而,当前多数人工触觉传感系统(ATSSs)主要聚焦于法向压力检测,如物体硬度或形状的识别,在切向力感知、粘滑状态判断以及运动轨迹追踪方面仍存在明显不足。这限制了机器人在智能抓取、滑落预警等危险响应场景以及自然人机交互中的实际表现。因此,研究目标聚焦于仿生构建具有高频响应能力和高切向灵敏度的人工帕西尼小体(APC),以突破现有ATSS在多维触觉感知上的技术瓶颈。
所设计的人工帕西尼小体(APC)采用TOCN-MXene气凝胶材料,模仿天然PC的层状微观结构。该结构赋予器件独特的力学各向异性:轴向具有较高的刚度(在40%应变下应力达3.005 kPa),而径向则表现出良好的弹性(70%应变下应力为2.127 kPa)。其轴向弹性模量为1.59 kPa,径向为0.83 kPa,塑性变形仅为0.27%,确保在承受切向力时可实现可逆形变。
此外,APC展现出负泊松比特性,压缩过程中径向发生收缩而非膨胀,最低值可达-0.496。这一现象源于多层堆叠结构在非均匀压缩下的接触行为,有效增强了切向变形过程中各层之间的相互作用,从而提升传感性能。
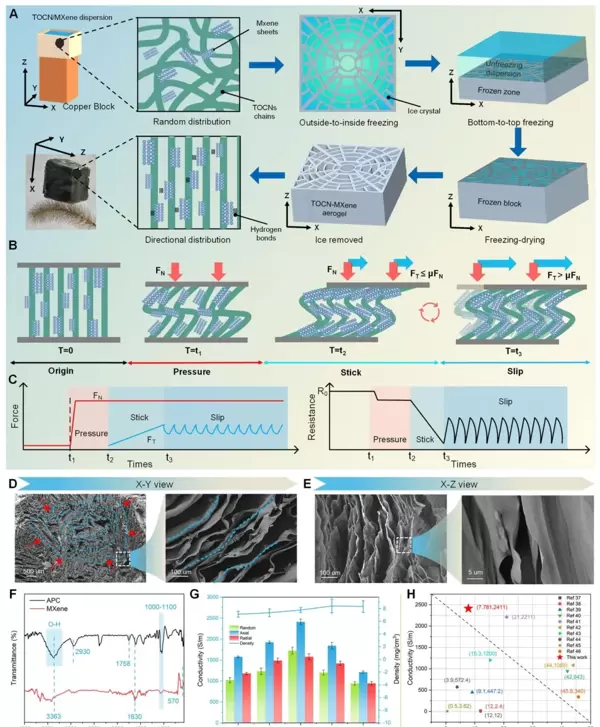
在粘滑检测方面,APC通过电阻变化实现精准识别。静态摩擦阶段(Ft ≤ μFn,μ为摩擦系数),施加的切向力引发层状结构单向屈曲,导致MXene层间接触面积增加,导电通路增强,电阻(R)显著下降。此时,相对电阻变化ΔR/R0与切向力的相关性高达r = 0.86 ± 0.09,远高于与法向力的相关性(r = 0.19 ± 0.03),实现了对切向力的特异性响应。
当进入滑移阶段(Ft > μFn),此前积累的弹性势能迅速释放,层状结构恢复原状,MXene层间接触减少,电阻出现高频振荡。振荡频率f与滑动速度v满足关系式f = v/λ(λ代表表面微凸体特征尺寸)。例如,20 mm/s的快速滑动产生100–150 Hz的高频信号,而1 mm/s的慢速滑动则对应低频响应,可通过频率特征准确判断滑动速度。
不同触觉事件可通过电阻响应模式进行区分:静态接触时,加载与卸载过程引起ΔR/R0突变,稳态期间信号稳定无振荡;滑移事件则表现为瞬时单峰信号,且峰值幅度高于静态接触,归因于切向力的急剧变化。
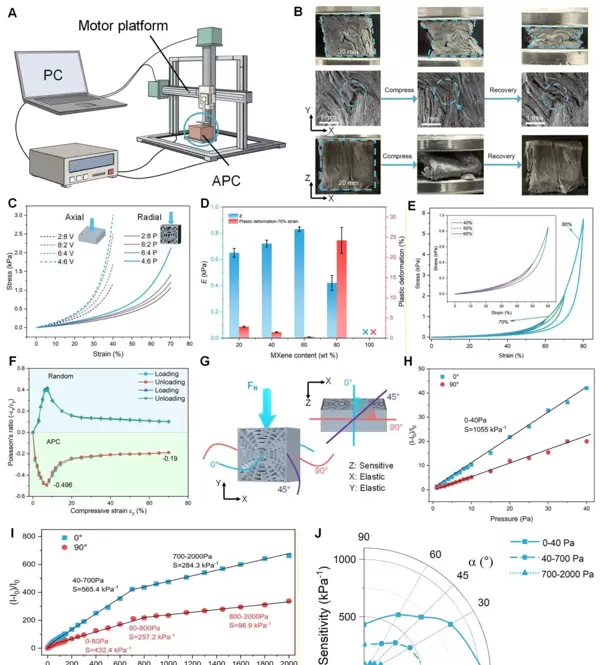
图3. 人工帕西尼小体(APC)的力学与压阻性能表征
A)定制化测试平台示意图,用于同步评估APC的力学行为与压阻响应特性。
B)在径向压缩下的形变图像(上图),以及压缩-恢复过程中获取的金相显微图像(中图,比例尺:1毫米);下图为轴向压缩与恢复阶段的形变情况。
C)含有不同MXene比例(20%、40%、60%、80%)的APC样品,在轴向和径向受压时的应力-应变关系曲线。
D)在70%应变条件下进行轴向压缩测试所获得的弹性模量(E)及塑性变形数据。误差条表示五次重复测量中标准差(SDs)的分布范围。
E)APC在高达80%应变下的循环加载滞后行为。插图展示了应变至60%时的滞后回线。
F)APC与对照组材料在70%应变范围内经历加载-卸载循环时,泊松比随周期变化的趋势比较。
G)方向敏感性原理图:当沿y轴施加径向压力时,z轴方向(0°)灵敏度最高,并随着探测角度向x轴方向(90°)旋转而逐渐减弱。
H)在0°方向测量下,APC对0–40帕压力范围内的相对电流变化((I-I)/I)及其对应的力灵敏度表现。
I)在0°与90°两个方向上,APC在整个0–2000帕压力区间内的相对电流响应与灵敏度对比。
J)以极坐标形式呈现的不同压力水平和方向角(最大达90°)下的灵敏度分布图。
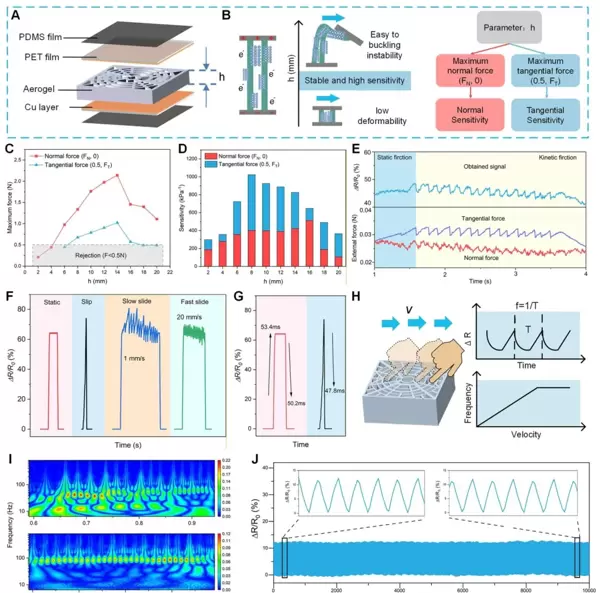
图4. 基于APC传感器的粘滑触觉感知中切向灵敏度增强机制
A)APC传感器整体结构设计示意图。
B)左侧:结构高度(h)影响切向响应灵敏度的机理说明,用于优化传感器高度参数;右侧:不同高度APC在法向力与切向力作用下的灵敏度及承载能力实测结果。
C)各高度APC样本所能承受的最大法向与切向载荷能力对比;D)对应的高度相关灵敏度分析结果,图中标注区域为性能不达标范围。
E)在一个完整滑动周期内,传感器记录到的法向力、切向力以及归一化电阻变化ΔR/R(%)信号响应。
F)APC对静压力、初始滑移、慢速滑动(约1毫米/秒)和快速滑动(20毫米/秒)状态的动态响应特征。
G)在静态压力与动态滑移条件下的响应时间与松弛时间测定结果。
H)滑移速度(v)与信号特征频率(f)之间的关联示意图。
I)慢速滑动(上图)与高速滑动(下图)过程中APC输出信号的时频分析谱图。
J)耐久性验证实验中,APC传感器在10000次周期性滑移加载(速度为20毫米/秒)下ΔR/R(%)的变化趋势。
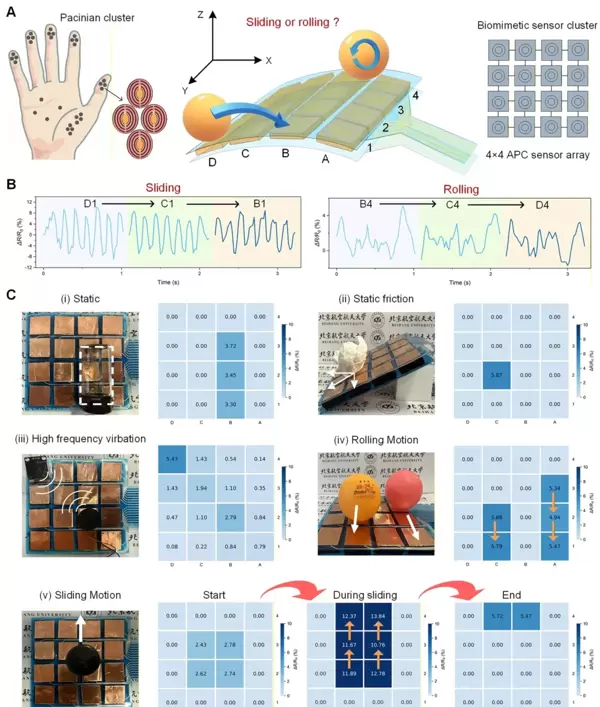
图5. 面向时空多维感知的APC阵列触觉系统
A)由4×4 APC传感器构成的触觉阵列系统示意图,其布局仿照人体皮肤中帕西尼小体(PC)的簇状分布结构。
B)该阵列能够有效区分乒乓球的滑动与滚动运动模式。
C)空间响应功能展示:i)物体形状识别能力;ii)静摩擦事件检测;iii)高频振动感知(D4单元响应40赫兹,B2单元响应20赫兹);同时具备iv)滚动路径实时追踪和v)定向滑动运动监测能力。
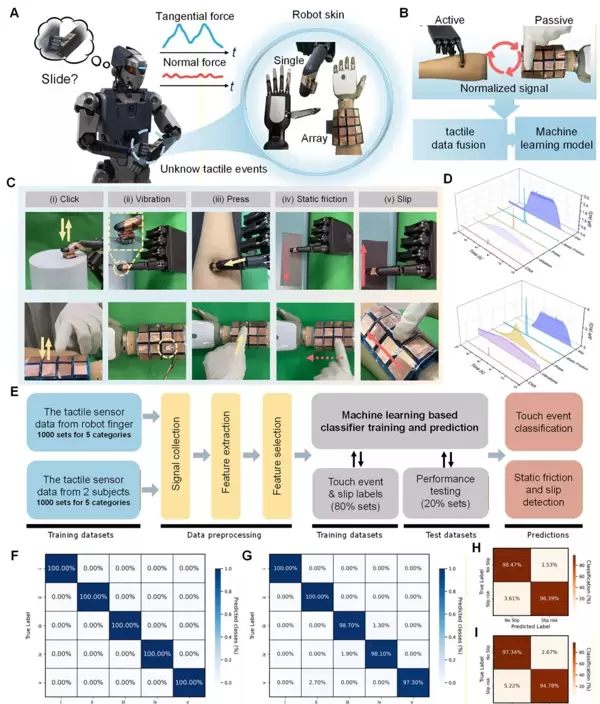
图6. 多维触觉感知赋能人机交互系统
A)集成APC触觉系统的仿人机器人架构示意图,实现多维度触觉信息采集。
B)机器人手指端配备单个APC传感器,用于主动触觉探索;机器人手臂覆盖APC阵列,感知外部被动刺激。采集信号经归一化、融合与标注后,输入至机器学习模型进行训练。
C)系统可在主动与被动触觉模式下识别五类典型触觉事件:点击、振动、按压、静摩擦与滑移。
D)各类人机交互动作对应的电阻变化信号波形图。
E)数据处理与机器学习流程图,涵盖触觉事件分类、静摩擦与动态滑移识别的算法实现路径。
F)机器人手指在主动交互场景下,五种触觉事件分类结果的混淆矩阵,分类准确率达到100%。
G)机器人手臂在被动感知任务中的触觉事件分类混淆矩阵,平均准确率为98.82%。
H)主动交互中静摩擦与滑移状态识别的混淆矩阵,平均准确率为97.43%;I)被动交互情境下的同类任务识别结果,平均准确率为96.06%。

 京公网安备 11010802022788号
京公网安备 11010802022788号







