


 雷达卡
雷达卡



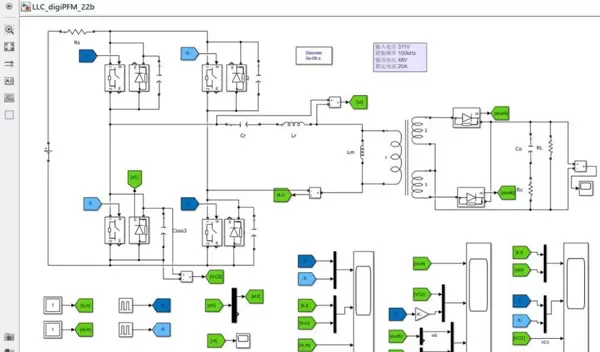
在电力电子系统中,LLC谐振变换器因其高效率、高功率密度以及良好的软开关特性,被广泛应用于各类电源设计。为了充分发挥其性能优势,合理的控制策略至关重要。本文将围绕Matlab/Simulink平台,介绍几种常见的LLC谐振变换器闭环控制方法的仿真实现。
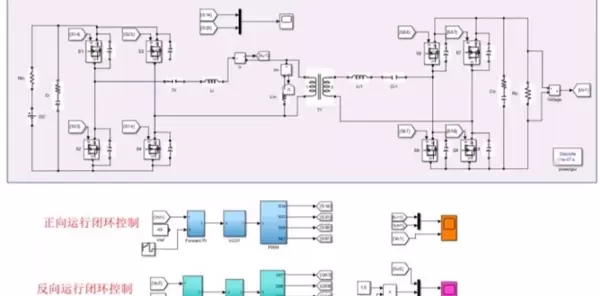
 该控制架构在Simulink中需引入电压和电流反馈通路,并配置两个PI控制器分别处理内外环调节任务。典型控制逻辑如下所示:
该控制架构在Simulink中需引入电压和电流反馈通路,并配置两个PI控制器分别处理内外环调节任务。典型控制逻辑如下所示:
 在Simulink中可通过逻辑判断模块实现使能控制逻辑,例如:
在Simulink中可通过逻辑判断模块实现使能控制逻辑,例如:
 相较于传统PI控制,ADRC在应对负载跳变或输入电压波动时表现出更优的动态性能。其核心模块ESO的实现较为复杂,涉及状态估计与非线性反馈设计,示例如下:
相较于传统PI控制,ADRC在应对负载跳变或输入电压波动时表现出更优的动态性能。其核心模块ESO的实现较为复杂,涉及状态估计与非线性反馈设计,示例如下:
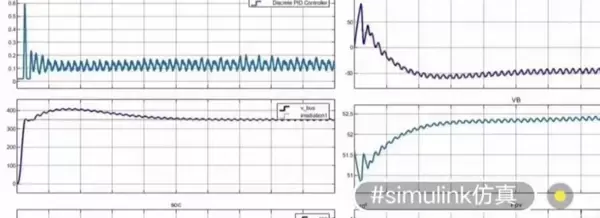
 在Matlab/Simulink环境下开展上述各类控制策略的闭环仿真,有助于全面评估不同方法在稳定性、响应速度、效率等方面的表现,为工程选型提供可靠依据。每种控制方式各有侧重:PFM契合LLC本征特性,双环控制提升精度,PWM利于EMI管理,Burst优化轻载效率,ADRC强化动态性能。
在Matlab/Simulink环境下开展上述各类控制策略的闭环仿真,有助于全面评估不同方法在稳定性、响应速度、效率等方面的表现,为工程选型提供可靠依据。每种控制方式各有侧重:PFM契合LLC本征特性,双环控制提升精度,PWM利于EMI管理,Burst优化轻载效率,ADRC强化动态性能。
 最终设计方案应基于实际应用场景的需求权衡选择,在效率、成本、复杂度与性能之间取得最佳平衡。
最终设计方案应基于实际应用场景的需求权衡选择,在效率、成本、复杂度与性能之间取得最佳平衡。
1. 变频控制(PFM - Pulse Frequency Modulation)
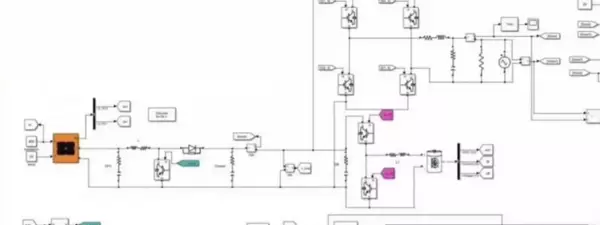
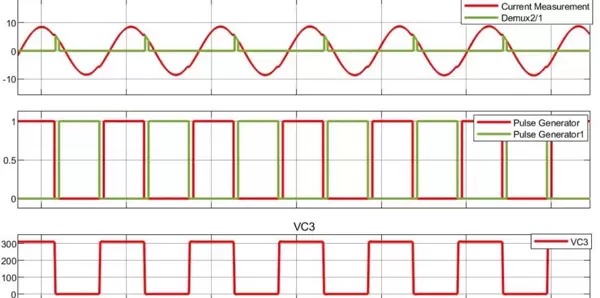
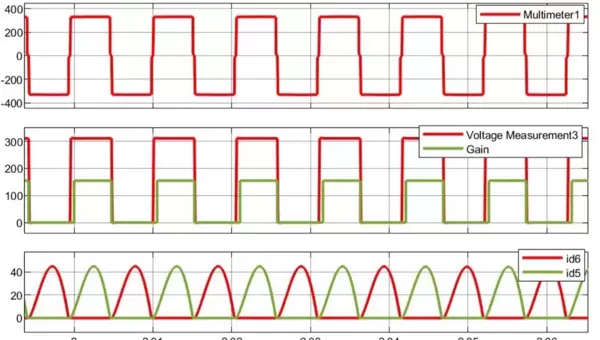
变频控制是LLC拓扑中最典型的调控手段之一。其核心原理是通过调节开关频率来改变谐振腔的工作状态,从而影响输出电压。由于LLC的增益特性与开关频率密切相关,因此调整频率即可实现稳压目的。 在Simulink环境中构建该控制系统时,通常会使用信号发生器模块生成可变频率的驱动脉冲。例如:% 简单示意产生变频信号的代码
fs = 100e3; % 初始频率
t = 0:1/fs:1; % 时间向量
freq = 50e3:1e3:150e3; % 频率变化范围
for i = 1:length(freq)
signal = sin(2*pi*freq(i)*t); % 模拟变频信号
% 这里可以添加将信号连接到变换器模型的逻辑
end2. PFM电压电流双环控制
为进一步提升系统的稳定性和响应精度,常采用电压外环与电流内环相结合的双闭环控制结构。其中,电压环负责检测输出电压偏差,并据此调整电流环的参考值;电流环则根据实时电感电流与设定值之间的误差,调节开关频率,实现精确控制。
该控制架构在Simulink中需引入电压和电流反馈通路,并配置两个PI控制器分别处理内外环调节任务。典型控制逻辑如下所示:
% 简单的PI控制器代码示意
Kp = 0.1; % 比例系数
Ki = 0.01; % 积分系数
error = ref - actual; % 给定值与实际值的误差
integral = integral + error*Ts; % Ts为采样时间
output = Kp*error + Ki*integral; % PI控制器输出3. PWM控制(占空比调节)
不同于PFM,PWM(Pulse Width Modulation)控制保持开关频率恒定,仅通过调节导通时间占周期的比例(即占空比)来控制能量传输。尽管LLC本身更适配变频控制,但在某些特定应用中仍可采用固定频率PWM方案。% 生成PWM信号代码示意
T = 1/fs; % 开关周期
duty = 0.5; % 初始占空比
t = 0:1e - 6:T; % 时间向量
pwm_signal = zeros(size(t));
for i = 1:length(t)
if t(i) <= duty*T
pwm_signal(i) = 1;
else
pwm_signal(i) = 0;
end
end4. Burst控制(间歇工作模式)
针对轻载或待机状态下效率下降的问题,Burst控制应运而生。其基本思路是在低负载时让变换器周期性地开启与关闭,通过调节“工作”与“休眠”时间的比例来维持输出电压稳定。
在Simulink中可通过逻辑判断模块实现使能控制逻辑,例如:
% Burst控制逻辑示意
if load < threshold % load为负载值,threshold为设定的轻载阈值
enable = 0; % 关闭变换器
else
enable = 1; % 开启变换器
end5. ADRC自抗扰控制
ADRC(Active Disturbance Rejection Control)作为一种先进控制理论,近年来逐渐应用于电力电子领域。它通过扩张状态观测器(ESO)实时估计系统内部参数变化及外部扰动,并进行前馈补偿,从而实现快速响应和强鲁棒性。
相较于传统PI控制,ADRC在应对负载跳变或输入电压波动时表现出更优的动态性能。其核心模块ESO的实现较为复杂,涉及状态估计与非线性反馈设计,示例如下:
% 简单的ESO代码框架示意
function [z,zdot] = ESO(x,u,z,beta01,beta02,beta03)
e = z(1) - x;
zdot(1) = z(2) - beta01*e;
zdot(2) = z(3) - beta02*fal(e,0.5,0.01) + b0*u;
zdot(3) = -beta03*fal(e,0.25,0.01);
z = z + zdot*Ts; % Ts为采样时间
end
function y = fal(e,a,d)
if abs(e) > d
y = abs(e)^a*sign(e);
else
y = e/d^(1 - a);
end
end
 京公网安备 11010802022788号
京公网安备 11010802022788号







