


 雷达卡
雷达卡



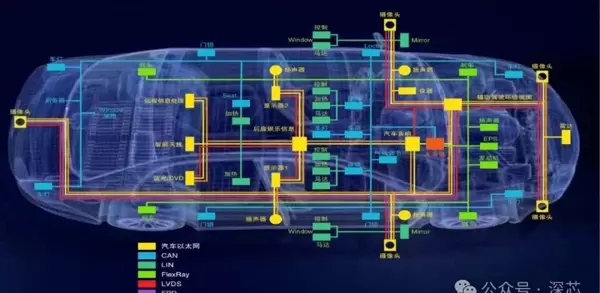
在现代车身通信网络中,多种通信协议被广泛应用,包括CAN、LIN、以太网、FlexRay以及LVDS等,共同构建起高效可靠的车载信息交互体系。
其中,LIN(Local Interconnect Network)是一种面向汽车电子与工业控制领域设计的低成本串行通信协议,主要应用于对实时性要求不高、数据传输速率较低的场景。作为CAN总线的有效补充,LIN常用于车身内部的分布式子系统控制,例如车门、座椅和空调模块等。典型的架构中,LIN主节点可充当与CAN总线之间的网关角色,实现不同网络间的通信桥接(如将车门中的LIN网络接入车身CAN总线)。
CAN被视为整车通信的“神经中枢”,具备高带宽与强容错能力,支撑关键系统的安全性和实时响应;而LIN则扮演“末梢神经”的角色,凭借极高的性价比完成轻量级、分布式的控制任务。二者通过“主干-分支”式的分层结构,借助网关连接,形成协同工作的最优车身控制方案。
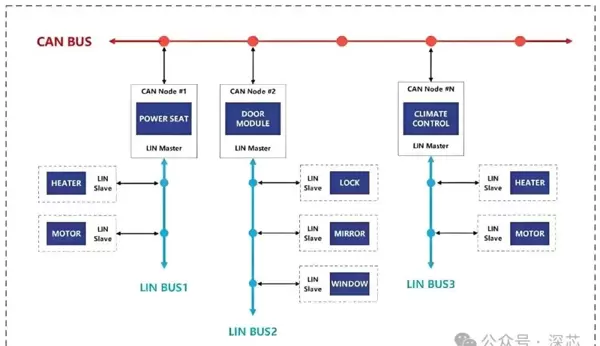
该架构示意如下:
1. LIN通信的核心特性
主从式架构(单主多从)
- 主节点:唯一有权发起通信的设备,负责发送帧头(Header),调度整个通信流程。
- 从节点:仅能响应主节点的请求,不具备主动发送数据的能力,单个网络最多支持16个节点。
通信参数
- 传输速率:最高可达20 kbps,通常使用9.6 kbps或19.2 kbps,适用于低速控制应用。
- 电平标准:采用12V单线总线设计,显性电平(逻辑0)为地(GND ≈ 0V),隐性电平(逻辑1)为电池电压VBAT(范围8–18V)。
- 最大总线长度:不超过40米,过长会导致信号衰减,影响通信稳定性。
低成本与简化设计优势
- 单线传输机制:仅需一根信号线加地线即可完成通信,显著降低线束成本与布线复杂度。
- 硬件依赖低:基于通用UART/SCI接口实现,无需专用通信控制器;从节点甚至可以不使用高精度晶振,依靠主节点进行时钟同步。
- 灵活扩展能力:新增从节点时,无需更改现有硬件配置或软件逻辑,便于系统升级与维护。
2. 硬件连接结构
LIN网络中的每个节点(无论是主节点还是从节点)都由以下核心部分组成:
MCU(微控制器单元)
- 承担协议处理任务,如帧的封装与解析。
- 执行应用层逻辑,例如采集传感器数据或控制执行器动作。
- 通过UART/SCI接口(TXD/RXD引脚)与LIN收发器相连,输出TTL/CMOS电平信号。
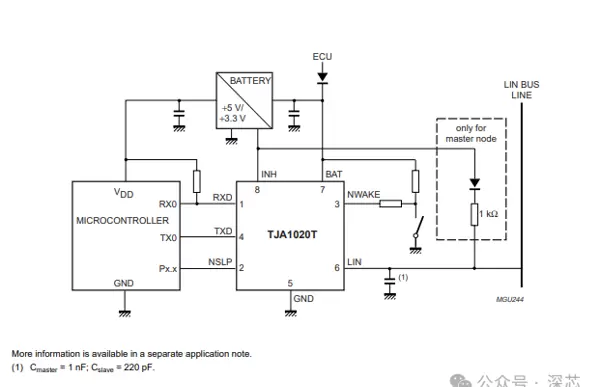
LIN收发器(例如TJA1020)
- 实现电平转换功能:将MCU输出的TTL信号(0V/3.3V)与总线上的高压信号(显性0V / 隐性12V)之间进行双向转换。
- 支持低功耗管理:通过NSLP(sleep)引脚接收MCU指令,控制收发器进入工作或休眠模式,休眠电流低于1μA,有助于节能。
外围电路设计
- 主节点外围电路:包含1kΩ电阻、防反接二极管及滤波电容,主要用于阻抗匹配、防止电源反接以及抑制干扰噪声。
- 从节点外围电路:一般仅需滤波电容,用于消除局部高频噪声,提升信号质量。
电平定义与转换过程
- 显性电平(逻辑0):LIN_H ≈ 0V
- 隐性电平(逻辑1):LIN_H ≈ VBAT
发送过程:当MCU输出TXD=0(0V)时,收发器将总线拉低至0V,形成显性位;
接收过程:当总线处于显性电平(0V)时,收发器将其转换为RXD=0(0V)并传送给MCU,从而识别为逻辑0。
综上所述,LIN协议通过**单线拓扑结构**与**分层硬件分工机制**——即MCU负责协议处理与控制逻辑,收发器专注电平转换——实现了极致的成本控制与系统简化,特别适用于车窗升降、座椅调节等非关键性车身控制系统。

 京公网安备 11010802022788号
京公网安备 11010802022788号







