


 雷达卡
雷达卡



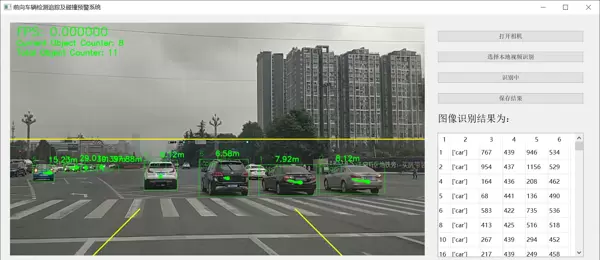
在智能驾驶技术不断发展的背景下,前车碰撞预警(Forward Collision Warning, FCW)作为核心安全功能之一,扮演着至关重要的角色。它通过实时感知前方交通状况,提前识别潜在的碰撞风险,为驾驶员提供及时警示,从而有效提升行车安全性。本文将围绕一套基于深度学习与单目摄像头测距实现的FCW系统源码展开介绍。
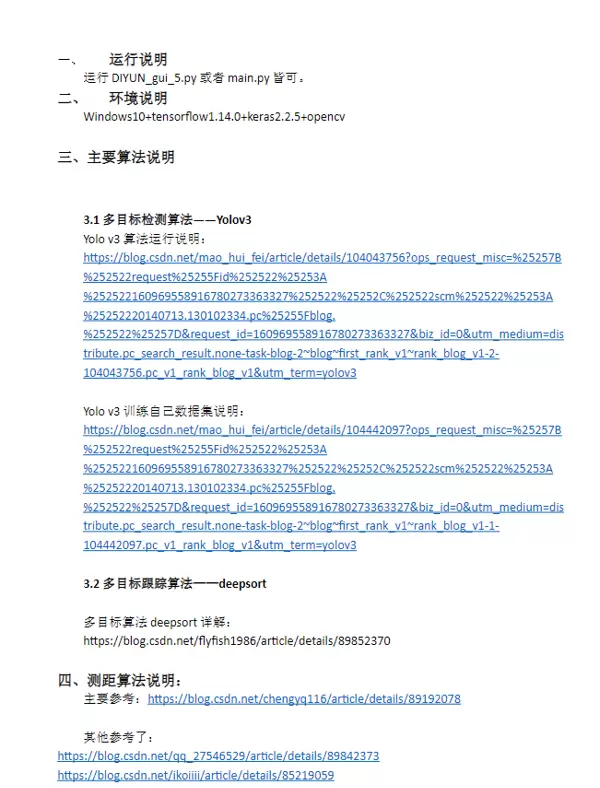
核心技术组成
该系统集成了多项关键技术模块,主要包括:车辆检测、单目测距以及多目标跟踪,是构建智能ADAS(高级驾驶辅助系统)的重要组成部分。
- 车辆检测:利用深度学习模型对摄像头采集的图像进行分析,精准识别画面中的车辆目标。
- 单目测距:基于单个摄像头获取的视觉信息,结合几何原理和深度学习推理算法,估算本车与前车之间的相对距离。
- 多目标跟踪:在动态交通环境中,持续追踪多个移动车辆的位置与运动轨迹,确保预警系统的连续性和稳定性。
开发环境版本说明
为保证项目顺利运行,需注意各依赖库之间的兼容性问题。以下是所使用的技术栈版本信息:
GPU 加速版本配置
Anaconda: 3-5.1.0
作为主流的Python科学计算发行版,Anaconda 提供了完整的包管理与环境隔离能力,便于项目的部署与维护。
CUDA: 10.0
NVIDIA推出的并行计算平台CUDA,能够充分发挥GPU的算力优势,显著加速神经网络训练与推理过程。例如,在TensorFlow中可通过如下方式启用GPU设备:
import tensorflow as tf
# 假设已经构建好模型model
with tf.device('/GPU:0'):
model.compile(optimizer='adam', loss='categorical_crossentropy')
model.fit(x_train, y_train, epochs = 10, batch_size = 32)通过指定设备上下文,模型可在GPU上执行运算,大幅提升处理效率。
tf.device('/GPU:0')cuDNN: cudnn-10.0-windows10-x64-v7.6.5.32
作为专为深度神经网络优化的底层库,cuDNN 针对卷积、池化等常见操作进行了高度优化,配合CUDA可进一步提升计算性能。
tensorflow-gpu: 1.14.0
基于CUDA与cuDNN支持的TensorFlow GPU版本,适用于高性能场景下的模型训练与推断。
OpenCV: 4.2.0
负责图像采集与预处理工作,如读取摄像头视频流、图像缩放、颜色空间转换等。以下代码展示了如何通过OpenCV捕获实时图像帧:
import cv2
cap = cv2.VideoCapture(0)
while True:
ret, frame = cap.read()
if not ret:
break
cv2.imshow('Camera Feed', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()Keras: 2.2.5
作为高层神经网络API,Keras 构建于TensorFlow之上,极大简化了模型搭建流程。例如,可以快速定义一个全连接网络结构:
from keras.models import Sequential
from keras.layers import Dense
model = Sequential()
model.add(Dense(64, activation='relu', input_dim = 100))
model.add(Dense(10, activation='softmax'))
model.compile(optimizer='rmsprop', loss='categorical_crossentropy', metrics=['accuracy'])CPU 版本配置
Anaconda: 3-5.1.0
同样用于构建统一的开发环境。
TensorFlow: 1.14.0
CPU版本无需依赖显卡即可运行深度学习模型,适合资源受限或调试阶段使用,但计算速度较慢。
OpenCV: 4.2.0 与 Keras: 2.2.5
功能与GPU版本一致,分别承担图像处理与模型接口任务。
需要说明的是,当前提供的内容仅包含完整源码及配套的设计文档讲解,不涉及任何附加服务或联系方式。对于希望深入理解FCW系统底层实现机制、探索单目测距算法细节或多目标跟踪逻辑的研究者与开发者而言,此套资料具有较高的参考价值。通过对源码的研读与二次开发,有助于进一步优化系统响应精度与实时性,推动智能驾驶安全技术的实际落地应用。



 京公网安备 11010802022788号
京公网安备 11010802022788号







