


 雷达卡
雷达卡



前言
当人工智能从虚拟的数字领域迈向现实的物理空间,一场关于“智能如何实体化”的变革正在悄然兴起。2025年,“具身智能”首次被列入政府工作报告,成为国家重点发展的未来产业,全球范围内的投资超过500亿元,中国产业规模达到了4800亿元,同比增长67.8%。从工业生产线的灵活生产到家庭环境的智能化服务,从医疗辅助的精确操作到紧急救援的高风险任务,具身智能正以“物理实体+AI大脑”的形式,弥补传统人工智能“知行不一”的缺陷。
文章目录
- 前言
- 一、什么是具身智能?
- 二、研究现状:从技术突破到场景应用
- 三、研究方向:未来技术发展的核心赛道
- 四、头部公司:全球玩家的技术布局与竞争态势
- 总结
一、什么是具身智能?
定义与核心特征
2025年,国际人工智能学会(IAAI)联合IEEE、ACM等权威机构发布的《具身智能技术白皮书》首次明确了标准化定义:具身智能是指具备物理形态的智能实体,通过“感知-决策-行动-反馈”闭环系统与物理环境进行持续互动,能够理解、适应并改造环境,具备在开放世界中完成复杂任务的能力。
与传统的“非具身智能”(如ChatGPT等纯软件AI)相比,具身智能的核心特点体现在四个方面:
- 具身性:拥有物理载体(机器人主体)、感知系统(多模态传感器)、行动能力(执行器)和社会角色,更注重对物理规律的内在理解(如重力、摩擦力),实现从“有形体”到“懂物理”的进化;
- 互动性:与环境形成双向动态影响,通过感知指导行动,再以行动结果优化感知,而非被动接受信息;
- 适应性:能够在动态变化的开放环境中调整行为策略,应对不确定的场景;
- 涌现性:通过简单的规则与持续的互动,产生复杂且难以预测的高级智能行为。
核心逻辑与概念界限
具身智能的核心理念源自认知科学的“具身假设”——智能不是孤立于大脑或算法,而是身体形态、运动能力和环境动态结合的产物。这就像婴儿认识世界:不仅仅是依靠大脑思考,而是通过眼睛观察、耳朵聆听、双手触摸的互动过程积累知识。
需要注意的是,具身智能与其他相关概念有本质的区别:
- 与“智能体(Agent)”:智能体涵盖虚拟和物理形态,具身智能是智能体在物理世界的具象化;
- 与“通用人工智能(AGI)”:具身智能是AGI从数字世界走向物理现实的关键途径,而不是最终目标;
- 与“具身机器人”:前者是核心能力(智能层面),后者是具体载体(硬件层面)。
其技术框架呈现三层结构:顶层为语义理解和任务规划(大模型+世界模型),中间层为感知-决策融合(多模态统一表示),底层为物理交互与控制(运动规划+灵巧操作),形成“大脑+小脑+身体”的完整体系。
二、研究现状:从技术突破到场景应用
技术发展阶段
具身智能的研究已经从早期的“行为主义探索”(1990年代Brooks提出的“行为主义智能”)、“数学模型构建”(2018年Ay等人基于马尔可夫假设的抽象定义),进入了“多模态大模型驱动”的快速增长期。2023年ChatGPT发布后,相关研究呈指数级增长,仅2024年谷歌学术上“embodied agent”关键词的文章发表量就达到了1350篇,比往年翻了一番。
当前的技术突破主要集中在三个核心能力:
- 环境感知能力:基于多模态大模型(如GPT-4o、Gemini 1.5、Qwen-VL)实现跨模态理解,无需额外训练即可完成视觉定位、导航等任务,泛化能力显著增强;
- 长期任务规划:通过大模型的逻辑推理能力,将复杂指令分解为可执行的子任务。例如,“倒一杯水”可以拆解为“找到杯子-拿起杯子-定位饮水机-接水-送水”等步骤,解决了传统具身智能“任务分解难”的问题;
- 短期动作控制:从早期的API调用、代码生成,发展到具身大模型直接生成动作指令,ReKep算法通过关系关键点约束,大幅提高了操作精度和泛化能力。
应用场景应用进展
2025年被称为“具身智能产业化的元年”,技术已经从实验室走向多个领域的规模化应用:
- 工业制造:优必选Walker S1成为全球首个在工业场景中应用的人形机器人,与无人物流车协同工作,应用于比亚迪等汽车工厂,累计意向订单超过500台;龙旗科技车间使用具身机器人后,产品合格率提高了12%;
- 服务领域:
腾讯“小五”机器人在养老院场景实现扶持老人、取放物件等功能,双臂承重50千克,能应对楼梯、斜坡等复杂地形;酒店服务机器人云迹科技成功上市,成为“机器人服务智能体第一股”;
家庭场景:家庭服务机器人已能完成“准备一顿晚餐”等复杂任务,并且具有较高的完成率,但仍受限于成本与泛化能力,尚未广泛普及;
特种场景:在核电站巡检、应急救援等危险环境中,具身机器人替代人工操作,安全性大幅提高,成为高危场景的“必需解决方案”。
当前瓶颈与挑战:尽管进展明显,具身智能仍面临多重技术和产业化挑战:
Sim2Real落地鸿沟:在物料分拣等刚体任务中已实现突破,但流体物理模拟、柔性体接触等复杂场景仍需攻克,安全验证成为“最后一公里”难题;
硬件成本高昂:高精度灵巧手、多模态传感器等核心部件价格昂贵,限制了民用场景的普及;
泛化能力欠缺:在结构化环境中表现优秀,但面对开放世界的动态变化(如突发障碍物、任务变更),适应性仍需提升;
闭环学习效率低:真实世界数据采集成本高、周期长,难以形成“数据-模型-优化”的快速迭代循环。
三、研究方向:未来技术演进的核心赛道
1. 多模态大模型与世界模型协同
当前具身智能的核心趋势是“大脑升级”——将多模态大模型(MLLM)的语义理解能力与世界模型(WM)的物理预测能力相结合。世界模型能够推演物理环境的动态变化,为大模型提供“环境预判”支持,形成“感知-预测-决策”的全链路优化,这一组合被认为是具身智能实现“GPT式爆发”的关键。Fast-in-Slow推理范式已成为主流:大模型负责高层任务规划,专用模块处理底层实时执行,平衡了推理精度与响应速度。
2. 灵巧操作与高精度控制
灵巧操作是具身智能“手眼协调”的核心体现,成为2025年IROS大会的热点主题。当前研究聚焦于高自由度灵巧手的硬件研发与算法优化:Sharpa推出首款视触觉集成的22自由度灵巧手,实现荷官发牌等精细操作;舞肌科技展示高自由度灵巧手实机,突破了电机小型化、低发热等技术瓶颈。算法层面,模仿学习(Learning from Demonstration)成为主流路径,通过人类演示数据快速提升机器人操作熟练度。
3. 闭环学习与数据效率优化
针对真实世界数据稀缺的问题,闭环学习机制成为研究重点:智能体通过环境反馈持续优化模型参数,减少对人工标注数据的依赖。同时,低成本机械臂、开源仿真平台(如BEHAVIOR-1K基准测试)的发展,降低了数据采集与训练门槛,推动“真机训练+仿真迭代”的混合训练模式普及。
4. 多智能体协同与集群智能
单一具身智能体的能力有限,多具身智能体协同成为复杂场景的解决方案。研究方向包括:工业场景中“人形机器人+移动机器人”的任务分工,应急救援中的多机器人协作勘探,以及集群智能的分布式决策算法。通过机器人之间的通信与协同,实现“1+1>2”的任务执行效率提升。
5. 场景适配与商业化路径优化
学术界与产业界已形成共识:具身智能将遵循“工业先于家庭”的落地路径。工业场景任务明确、成本可控,已形成成熟商业模式;家庭服务场景则需等待成本下降与泛化能力提升,将先在医院、酒店等垂直场景渗透,再逐步进入普通家庭。
四、头部公司:全球玩家的技术布局与竞争格局
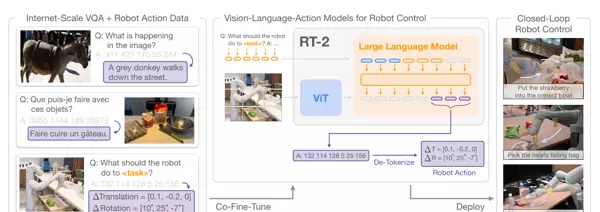
国外核心企业 谷歌DeepMind:技术领导者,推出视觉-语言-动作(VLA)模型RT-2,将网络数据与机器人数据融合训练,使未见过场景的任务成功率从32%提升至62%,奠定了具身大模型的技术基础;
特斯拉:专注于人形机器人Optimus,计划2025年底实现量产,凭借在自动驾驶、电机控制等领域的技术积累,主打“低成本+高可靠性”,目标成为民用场景的普及者;

Meta:深耕多模态融合与仿真训练平台,通过虚拟环境生成海量训练数据,降低真机训练成本,其研究成果在社交机器人、工业协作场景具有潜在应用;
亚马逊:以Astro家庭服务机器人为载体,结合Alexa语音助手的语义理解能力,打造“家居场景一体化解决方案”,侧重实用性与用户体验。
国内标杆企业 优必选:国内人形机器人领军者,Walker S1率先实现工业场景落地,搭载自主研发的ROSA2.0操作系统和第三代仿人灵巧手,累计意向订单超500台,2023年登陆港股成为“人形机器人第一股”;

腾讯Robotics X实验室:发布人居环境机器人“小五”,采用四腿轮足复合设计,覆盖180个检测点的触觉皮肤,在养老院场景展现出强大的地形适应与人机交互能力;
智元机器人:2024年初推出首个具身大模型,实现语言、视觉与动作的统一表示,通过21亿元收购上纬新材引发借壳上市猜测,聚焦高端具身智能解决方案;
宇树科技
:借助人形机器人亮相春晚的契机,加快IPO准备,计划于2025年底提交上市申请,有望成为A股“人形机器人第一股”,专注于消费级与工业级双线发展;
Sharpa/舞肌科技:在灵巧手技术上取得进展,Sharpa的视觉触觉融合灵巧手、舞肌科技的高灵活度机械臂,展示了国内硬件开发的最高水准,成为行业关键组件的主要供应商。
此外,斯坦德机器人、仙工智能、云迹科技等公司纷纷向IPO发起冲击,构建了“整机制造+核心部件+应用场景”的全产业链体系,2025年上半年,国内具身智能产业链融资活动达144起,融资总额195亿元。
总结
具身智能正处于“技术突破+产业实施”的双重转折点,成为人工智能从“数字虚拟”迈向“物理现实”的核心平台。从认知科学的假设,到多模态大型模型驱动的技术革新;从实验室的演示,到工业生产线的大规模应用,具身智能仅用了短短几年就实现了“从无到有”的转变,2025年的产业化元年标志着其正式进入“从一到多”的快速增长期。
目前,技术方面正向着“大型模型+世界模型”的合作方向发展,硬件方面集中于精细操作与成本降低,应用方面遵循“工业领先于家庭”的实施路线,政策与资金的支持则为行业发展提供了强大动力。然而,Sim2Real差距、泛化能力欠缺、成本高昂等问题仍需长时间解决,具身智能的“GPT时刻”尚未来临——正如专家预测,当世界模型能够实现全面的物理推理,当机器人集群产生大量真实数据时,才会迎来真正的飞跃性突破。
展望未来,具身智能不仅是实现通用人工智能的重要途径,也是促进产业升级、重塑人机互动模式的核心力量。它将使机器人从“编程工具”转变为“自主代理”,从工业生产到家庭服务,从医疗支持到紧急救援,广泛渗透到各行各业,推动人类社会步入“人机共创”的新时代。对于研究人员来说,这是一个充满挑战的学术前沿;对企业而言,这是一个万亿美元的市场机会;对于普通民众来说,这是一场即将改变生活的科技革命。
正如DeepMind首席科学家David Silver所说:“没有实体的AGI就像是没有形体的幽灵,无法真正理解人类的世界。” 具身智能的征程是星辰大海,而我们正处于这场革命的开端。

 京公网安备 11010802022788号
京公网安备 11010802022788号







