


 雷达卡
雷达卡



最近开发了一套基于VisionPro的视觉引导抓取系统,能够在振动盘场景中实现360°无序抓取,并具备正反面物料识别功能,现将技术思路整理分享。
一、系统构成与核心文件
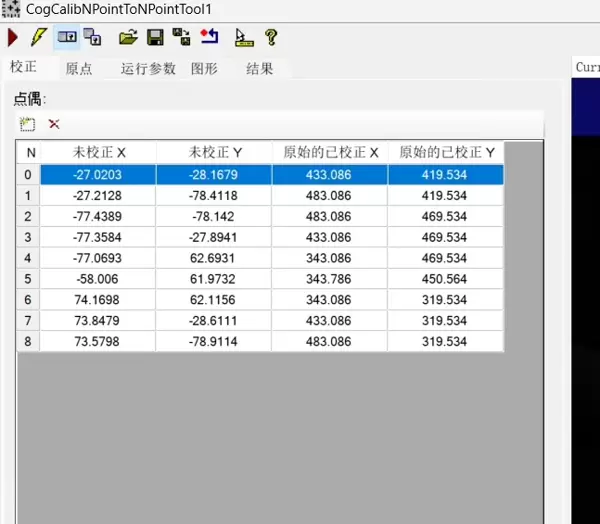
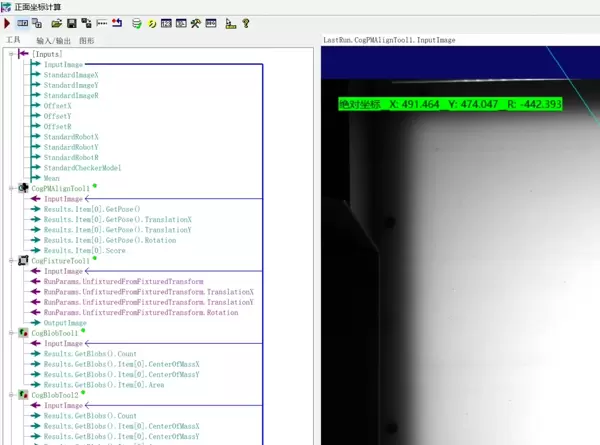
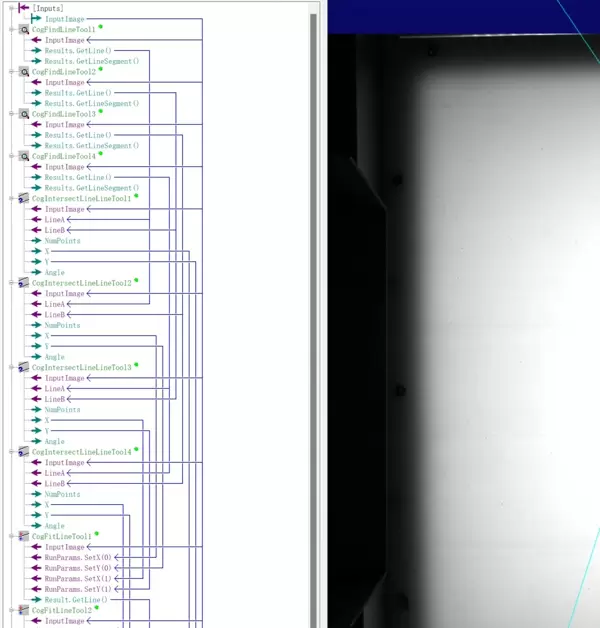
本方案包含多个关键组件:标定用的vpp文件、检测用的vpp文件以及对应的产品图像样本。其中,标定vpp用于完成视觉系统的参数校准,确保后续定位和识别的精度;检测vpp则负责实际的产品识别任务,包括判断物料方向(正/反)及确定机械手抓取坐标位置。产品图片作为识别模板,是整个检测流程的基础数据支撑。
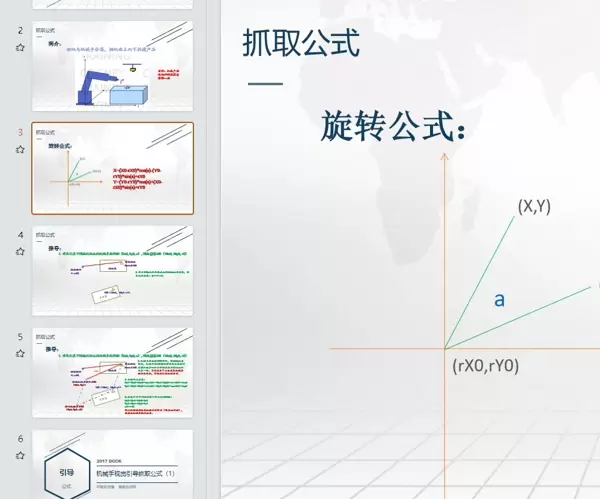
二、关键技术点——旋转中心计算原理
程序中涉及了较为复杂的几何运算,尤其是围绕物体旋转中心的数学建模。为了便于理解,配套准备了一份详细的旋转中心公式推导PPT,结合该文档可深入掌握代码逻辑背后的理论依据。
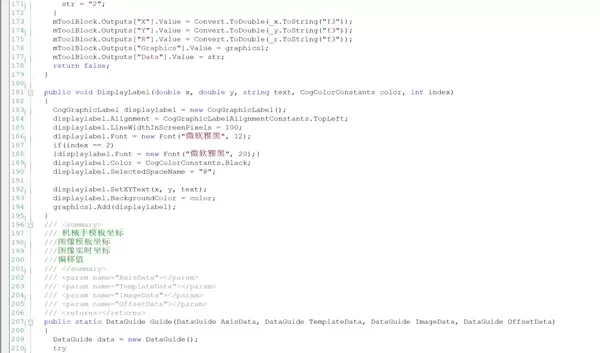
在二维空间中,当需要对目标物体进行旋转后的位置预测时,必须准确计算其绕某一点旋转后的坐标变化。这一过程依赖于旋转矩阵的基本原理。例如,在C#与VisionPro联合编程环境中,可能采用如下形式的代码结构(以下为简化示意):
// 假设已经获取到物体的一些特征点坐标 (x, y)
double x = 100;
double y = 150;
// 旋转角度
double angle = Math.PI / 4;
// 旋转中心坐标 (cx, cy)
double cx = 200;
double cy = 200;
// 计算旋转后的坐标
double newX = cx + (x - cx) * Math.Cos(angle) - (y - cy) * Math.Sin(angle);
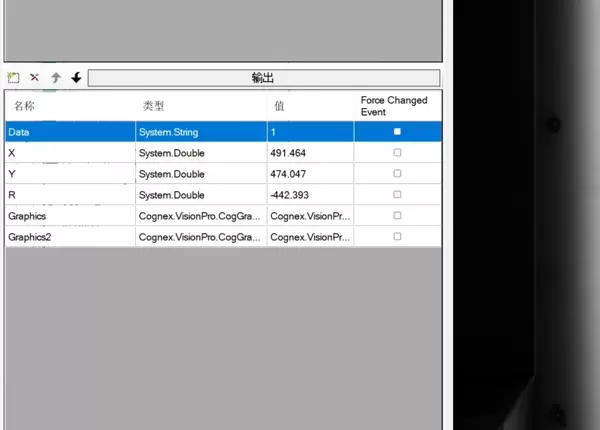
double newY = cy + (x - cx) * Math.Sin(angle) + (y - cy) * Math.Cos(angle);上述代码展示了如何利用旋转中心坐标 (cx, cy) 和给定角度 θ,对原始点 (x, y) 进行变换,得到新的位置 (newX, newY)。虽然实际项目中的实现会更加复杂,需融合图像特征提取、匹配算法等步骤,但整体计算框架与此一致。通过此类计算,系统能够精准预判物体姿态变化后的空间位置,从而为机器人提供可靠的抓取指引。
angle三、适用于初学者的学习价值
对于刚入门视觉引导领域的开发者而言,此项目具有较高的参考意义。它完整呈现了从视觉系统标定、目标检测到姿态分析与坐标转换的全流程,帮助新手快速建立对VisionPro平台的操作认知和整体项目架构的理解。
需要强调的是,本文仅提供一种可行的技术路径与实现思路。若应用于具体产品,请务必根据实际情况自行调整。不同工件的外形特征、尺寸差异以及现场光照、摆放方式等因素均会影响系统表现,因此不可直接照搬参数或逻辑,而应针对性优化标定策略、检测模型及旋转计算方法。
希望本次分享能为从事视觉引导抓取相关开发工作的朋友带来启发和技术支持。

 京公网安备 11010802022788号
京公网安备 11010802022788号







