


 雷达卡
雷达卡



基于GADF-CNN-LSTM的齿轮箱故障诊断方法
在工业设备状态监测中,齿轮箱的健康状况直接影响整个系统的运行稳定性,其故障诊断技术堪比“心脏监护仪”。本文介绍一种结合时频图像转换与深度学习模型的高效诊断方案——GADF-CNN-LSTM框架,并基于Matlab实现关键流程。
所用数据来源于东南大学公开的齿轮箱振动信号数据集,涵盖多种典型故障模式。整体诊断流程分为三个核心步骤:
- 利用GADF(Gramian Angular Difference Field)将一维振动信号转化为二维时频图像;
- 构建CNN-LSTM混合神经网络完成多类别故障识别;
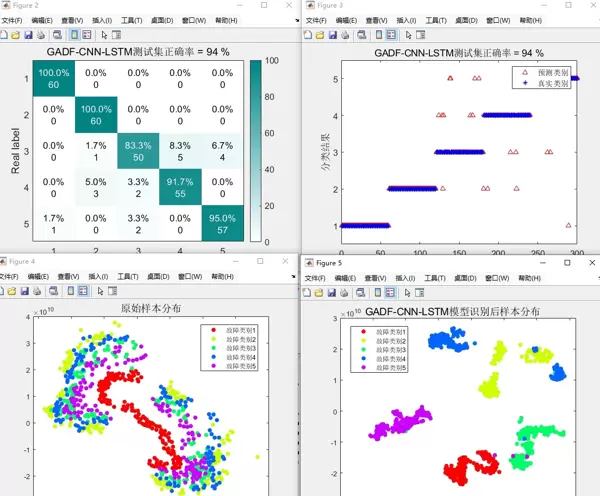
- 采用T-SNE算法对高层特征进行可视化分析,验证模型判别能力。
1. 振动信号到时频图的转化:GADF编码
原始振动信号具有强烈的时间依赖性,但直接输入深度网络难以有效提取空间结构特征。为此,引入GADF方法将其映射为二维图像表示。
具体处理过程如下:首先对时间序列进行归一化并转换至极坐标系,通过计算相位角差值生成格拉姆矩阵。该矩阵能够保留原始信号的时序相关性,同时增强非线性动态特征的表现力。
为适配后续卷积网络的标准输入尺寸,图像统一重采样为224×224像素。这一预处理操作不仅提升了特征可辨识度,也为模型训练提供了结构化输入。
% GADF转换函数
function gadf_image = generate_gadf(signal)
% 归一化到[-1,1]
norm_signal = (signal - min(signal))/(max(signal)-min(signal))*2 -1;
% 计算极坐标角度
phi = acos(norm_signal);
% 生成GADF矩阵
gadf_matrix = sin(phi + phi');
% 转换为灰度图像
gadf_image = mat2gray(gadf_matrix);
gadf_image = imresize(gadf_image, [224 224]); % 统一尺寸
end2. 深度混合模型构建:CNN与LSTM协同工作
CNN擅长捕捉局部空间模式,而LSTM则对序列演化规律敏感,二者融合可兼顾特征的空间分布与时序演变特性。
在网络设计中,前端使用多个卷积-池化模块提取图像高级语义特征;随后接入sequenceFoldingLayer层,将特征图展开为时间步序列,供后端LSTM层进一步挖掘跨时间片段的依赖关系。
这种“先看细节、再观趋势”的策略显著增强了模型对复杂工况的适应能力。最终分类层设置6个输出节点,对应东南大学数据集中六类典型故障状态。
layers = [
imageInputLayer([224 224 1])
convolution2dLayer(3, 32, 'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(2,'Stride',2)
convolution2dLayer(3, 64, 'Padding','same')
batchNormalizationLayer
reluLayer
maxPooling2dLayer(2,'Stride',2)
sequenceFoldingLayer('Name','folder');
lstmLayer(128,'OutputMode','sequence')
fullyConnectedLayer(6) % 六种故障类型
softmaxLayer
classificationLayer];3. 高层特征可视化:T-SNE揭示分布规律
为了评估模型是否真正学到了可区分的特征表达,引入T-SNE降维技术对倒数第二层池化输出的特征向量进行二维投影。
选择该层特征的原因在于:既包含足够的抽象语义信息,又未过度压缩导致信息丢失。不同故障类型以不同符号标记,提升视觉区分度,避免因颜色相近造成误判。
若可视化结果中各类样本聚集成簇且边界清晰,则说明网络已成功学习到具有判别性的特征表示。
feature_layer = 'pool_2'; % 选取池化层输出
features = activations(net, imds_val, feature_layer, 'OutputAs','rows');
% 降维可视化
tsne_features = tsne(features);
gscatter(tsne_features(:,1), tsne_features(:,2), labels, ...
'rgbcmy','o+xsd^', 15, 'filled');
title('故障特征分布T-SNE图');实践优化建议
- 谨慎实施数据增强:虽然图像扩增能提升泛化能力,但齿轮箱信号对相位关系敏感,过度裁剪或翻转可能破坏原始时序结构。
- 控制LSTM层数:实验表明,超过三层易引发梯度消失问题;相比之下,单层LSTM配合较大的隐藏单元数量反而表现更优。
- 动态调整学习率:推荐采用余弦退火策略(cosine annealing),初始学习率设为0.001,在训练过程中平滑衰减,有助于收敛稳定。
性能表现与优势分析
该方法在东南大学数据集上实现了98.7%的平均分类准确率。更为突出的是其抗噪能力:当加入20%强度的高斯白噪声后,准确率仍能维持在95%以上。
这一鲁棒性主要得益于GADF变换本身具备一定的滤波效应,能够在转换过程中抑制随机干扰,同时放大与故障相关的周期性波动特征,相当于为原始信号施加了一种自适应增强滤镜。
综上所述,GADF-CNN-LSTM构成了一套高效的“时频图像+时空建模范式”,适用于旋转机械的智能故障诊断任务,具备良好的工程应用前景。

 京公网安备 11010802022788号
京公网安备 11010802022788号







