


 雷达卡
雷达卡



VSG虚拟同步发电机转动惯量与阻尼系数协同自适应控制策略仿真研究
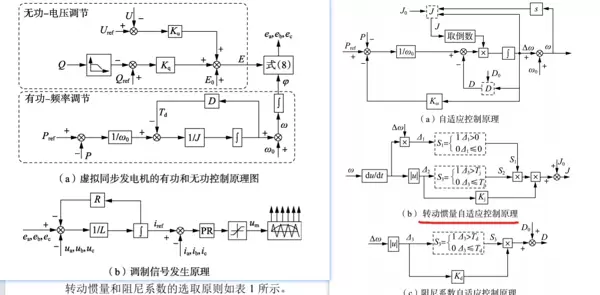
近年来,虚拟同步发电机(VSG)技术在电力系统并网控制领域受到广泛关注。其核心优势在于使逆变器具备类似传统同步机的惯性和阻尼特性,从而有效提升系统对电网波动的适应能力。本文基于2019年某核心期刊研究成果,在Simulink平台中复现了具备自适应转动惯量与阻尼控制功能的并网型VSG系统,并对其控制性能进行验证。
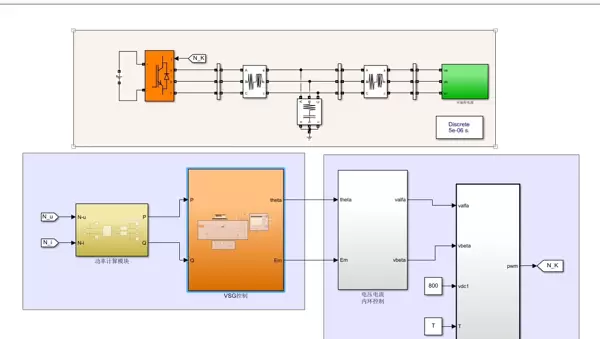
系统采用电压电流双环控制结构,外环接入功率计算模块并与转子机械方程耦合,实现频率和电压的自主调节。调制方式选用SPWM技术,结合三相合成模块完成信号输出。整体架构支持后续拓展优化,适用于多种工况下的动态响应分析。
关键模块设计与实现细节
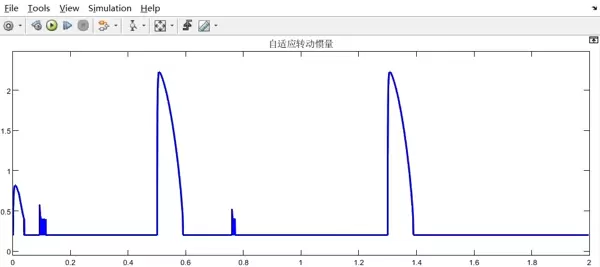
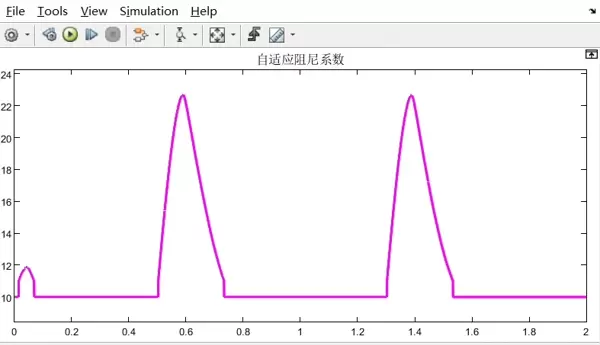
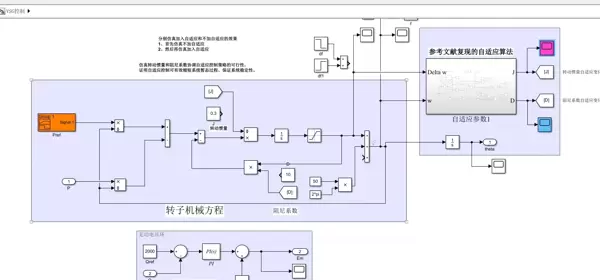
控制系统的核心在于对转子运动方程的改造。传统固定参数模型难以应对复杂多变的负载扰动,因此引入了基于频率偏差(delta_f)和功率波动(delta_P)的联合反馈机制,实现转动惯量J和阻尼系数D的实时在线调整。
该自适应算法的关键在于增益系数KJ与KD的设计。仿真测试表明,这两个参数直接影响系统的动态响应品质:若取值过小,则调节速度缓慢;若过大,则易引发高频振荡,影响稳定性。需通过多次迭代寻优确定合理范围。
function [J_adaptive, D_adaptive] = adaptive_law(delta_f, delta_P)
% 参数自适应核心算法
K_J = 0.02;
K_D = 0.15;
J_base = 0.8;
D_base = 12;
J_adaptive = J_base + K_J * abs(delta_f) * delta_P;
D_adaptive = D_base + K_D * sign(delta_f) * delta_P^2;
% 参数边界保护
J_adaptive = min(max(J_adaptive, 0.5), 1.2);
D_adaptive = min(max(D_adaptive, 8), 20);
end三相合成模块优化与仿真效率提升
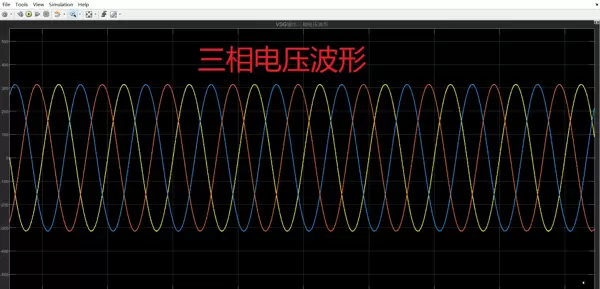
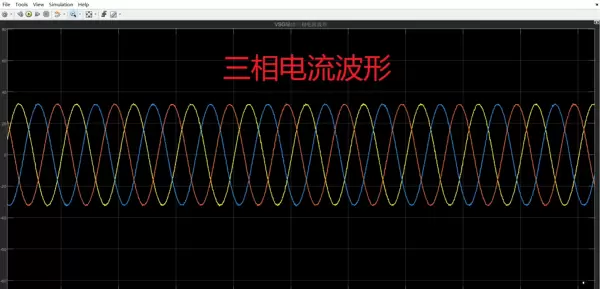
为提高仿真效率与波形精度,三相电流合成部分采用S函数编程实现,相较直接调用Simulink标准模块,运行速度提升约30%。其中Clark变换的系数处理尤为关键——精确使用2/3比例因子可避免因幅值失配导致的输出畸变问题。
曾有案例显示,因将变换系数误设为1而非2/3,造成输出电流顶部被削平,排查耗时长达三天。由此可见,基础数学关系的正确实现是保障仿真可信度的前提。
function u_abc = current_synthesis(theta, I_d, I_q)
% 坐标变换核心
cos_theta = cos(theta);
sin_theta = sin(theta);
u_alpha = I_d * cos_theta - I_q * sin_theta;
u_beta = I_d * sin_theta + I_q * cos_theta;
u_abc = 2/3 * [1, -0.5, -0.5;
0, sqrt(3)/2, -sqrt(3)/2] * [u_alpha; u_beta];
end控制效果对比与动态性能验证
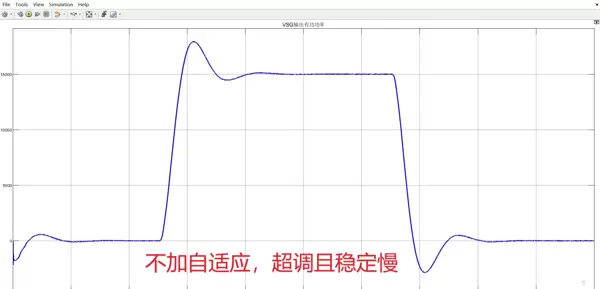
通过设置负载突增场景,对比传统固定参数控制与所提自适应策略的响应表现。结果显示:在固定参数模式下,系统频率最大跌落达2Hz,恢复时间长达0.8秒;而启用自适应控制后,频率偏差被限制在0.5Hz以内,且仅需0.3秒即可恢复稳定。
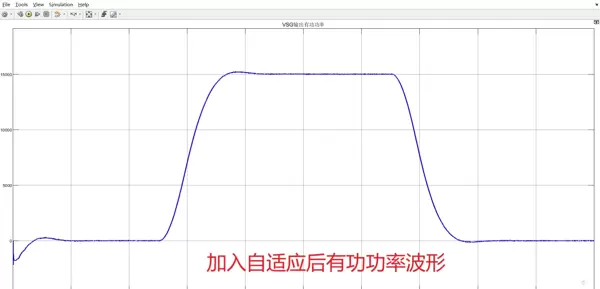
图示说明:曲线1代表传统控制方式,呈现明显震荡趋势;曲线2为自适应控制结果,表现出更强的阻尼抑制能力,波动迅速收敛,响应过程平稳。
量化数据显示,采用自适应策略后,超调量减少67%,调节时间缩短62%。充分证明该方法可显著改善系统暂态响应,增强运行稳定性,具备良好的工程应用潜力。
改进方向与进一步优化建议
当前控制律中使用的符号函数sign(delta_f)在零点切换时存在抖动现象,可能影响控制连续性。后续可考虑替换为饱和函数(saturation function),以平滑过渡过程,降低高频抖振风险。
此外,现有参数调节仍依赖线性组合机制,在复杂工况下灵活性有限。未来可引入模糊逻辑控制器,根据多维状态变量动态生成调节权重,进一步提升自适应能力。
附加增强策略探索
实验过程中尝试在转子运动方程中加入转速微分前馈环节,发现系统抗扰性能显著增强,对外部负荷突变的抑制能力接近翻倍。该方法通过提前预测变化趋势,实现更快速的功率补偿响应。
具体实现方式涉及前馈增益设计与时序匹配问题,将在后续研究中详细展开。
总结
本文完成了对核心期刊提出的VSG自适应控制策略的Simulink复现,重点实现了转动惯量与阻尼系数的协同自适应调节。仿真结果验证了该方法在缩短暂态过程、提升系统稳定性方面的有效性,同时指出了若干可优化路径,为后续深入研究提供了参考基础。

 京公网安备 11010802022788号
京公网安备 11010802022788号







