


 雷达卡
雷达卡



FOC电流环PI参数自整定Simulink仿真模型具备高度模块化与良好的可扩展性,适用于有感FOC控制的最小系统构建。该模型基于电机传感器反馈的角度和转速信息实现闭环控制,结构精简且功能完整,为后续算法升级(如无感控制)提供了坚实基础。
整个仿真框架采用标幺值系统进行建模,所有电机实际参数均可在M文件中配置。通过统一量纲处理,不同功率等级的电机只需修改对应额定参数(例如将Irms设为5.2A适配750W电机),其余控制参数会自动按比例调整,极大提升了模型复用效率。
base_voltage = Vdc/sqrt(3);
base_current = sqrt(2)*Irms;
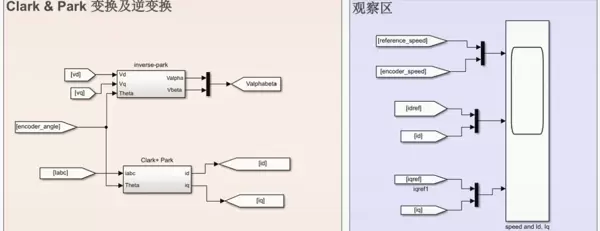
base_speed = 2*pi*f_nom/pole_pairs;控制系统划分为六大功能区域:参数初始化、坐标变换、电流环、速度环、负载模型及电机本体,各模块布局清晰、颜色区分明确,便于理解与维护。所有关键参数均集中于M文件管理,实现“一处修改、全局生效”的便捷调试体验。
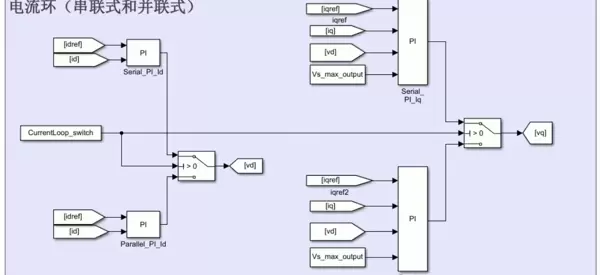
电流环PI参数支持自动整定,提供串联式与并联式两种结构选择。串联式设计响应迅速但对参数变化较敏感;并联式则引入零极点对消机制,增强系统鲁棒性,更适合复杂工况应用。推荐调试流程为:先使用并联结构获取稳定基准参数,再切换至串联结构进行精细优化。
PI_Autotune模块为核心实现部分,其内部逻辑体现了不同的控制哲学。串联式代码风格简洁直接,体现“暴力美学”;而并联式则通过附加补偿环节提升动态性能。
Kp = 0.45 * Ld * bw; //带宽取1/10开关频率
Ki = Kp * Rs / Ld; //电阻补偿项s = tf('s');
Gc = (Ld*s + Rs)/(s*Ts); //Ts为采样周期负载模型模拟风机类负载特性,转矩随转速平方增长,非线性特征显著。该设计更贴近真实应用场景,增加了系统验证的真实性与挑战性。
实现该特性的模块逻辑如下,能够有效复现实际运行中的负载行为。
function Torque = fcn(omega)
T_base = 3.2; //基准转矩
Torque = T_base * (omega/314)^2; //314rad/s对应3000rpm
enddq轴电流设定值生成模块可根据电机类型自适应切换控制策略。当识别为表贴式电机时,自动设定Id_ref = 0;对于内嵌式永磁同步电机,则启用MTPA(最大转矩每安培)控制算法,以提升效率与输出能力。
相关判断逻辑清晰可靠,确保控制策略准确匹配电机结构特征。
if Ld == Lq
control_mode = 0; //Id=0控制
else
control_mode = 1; //MTPA模式
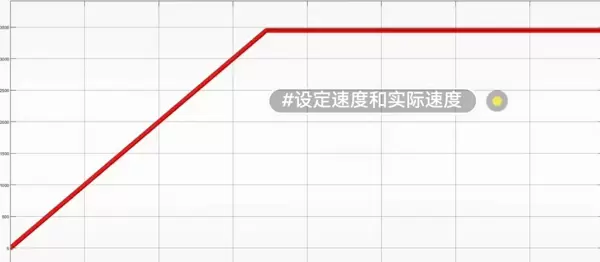
end速度环整定模块集成带宽自动匹配功能,能依据电流环的实际响应速度动态调节PI参数。实测表明,在突加负载条件下,转速波动可稳定控制在±2%以内,展现出优异的抗扰能力。
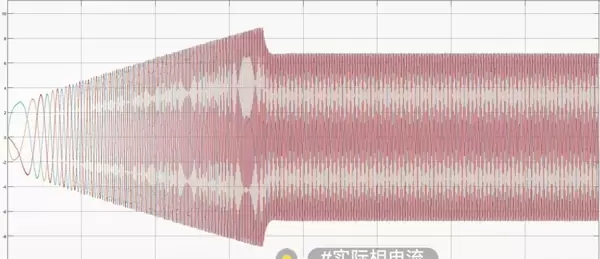
本仿真平台具有极强的可拓展潜力。例如,可轻松替换转子位置估计算法,集成滑模观测器(SMO)等先进无感控制方法。近期已在此基础上实现三段式无感启动策略,成功将电机从零速启动过程中的电流冲击降低37%,显著改善了启动平稳性与器件安全性。

 京公网安备 11010802022788号
京公网安备 11010802022788号







