


 雷达卡
雷达卡



在工业自动化快速发展的背景下,永磁同步电机因其高功率密度、高效能、结构紧凑、体积小以及强过载能力等优势,被广泛应用于工业机器人领域。随着对机器人性能要求的不断提升,其核心驱动部件——永磁同步电机的动态响应能力与运行稳定性愈发关键,尤其是电机的过载能力和转矩脉动特性,直接影响机器人的负载能力与动作精度。
过载能力决定了机器人在短时重载工况下的工作表现,直接关系到其作业效率和适用场景的广度。而转矩脉动则会引发电机输出力矩的波动,导致机械臂末端产生振动,影响定位精度与运行平稳性。因此,针对这两项核心指标进行系统性优化,具有重要的工程意义。
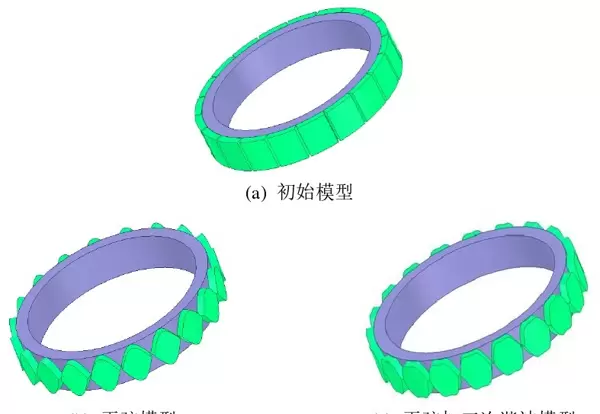
本文围绕面向工业机器人的永磁同步电机展开设计与优化研究。首先基于电机的电磁理论,从转矩公式与相量图出发,分析得出影响过载能力的关键参数:电枢绕组电阻、反电动势幅值、铁心饱和程度以及交轴与直轴电抗等。依据这些因素,设计了一台具备5倍过载能力的高动态响应永磁同步电机,并对转子结构形式、极槽配合方案、定子齿宽、槽口宽度及永磁体厚度等关键尺寸进行了多方案对比与优选。
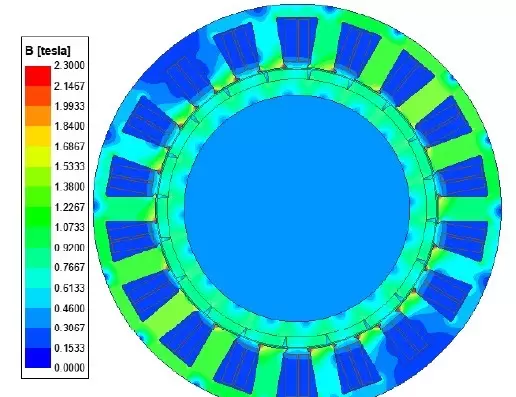
通过有限元仿真对所设计电机的过载性能与温升特性进行验证,结果表明:电机在持续高负载运行下可稳定实现5倍额定转矩输出,且各部位温升控制在合理范围内,满足绝缘等级的安全裕度要求。
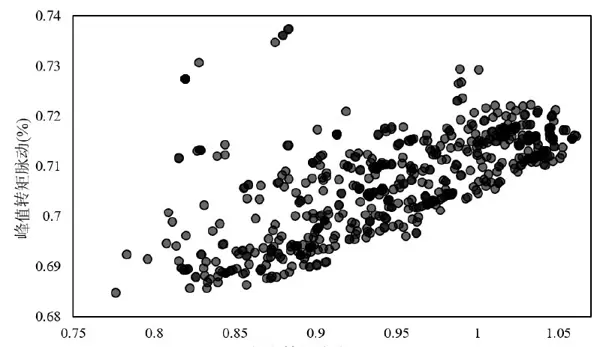
为进一步抑制转矩脉动,提出一种基于迭代思想的分阶段多目标优化策略。以额定工况下的转矩脉动与峰值转矩脉动作为优化目标,首先通过相关性分析将设计参数划分为两类:一级参数(与目标相关性较弱)和二级参数(高度相关)。对一级参数采用响应面模型进行初步优化;随后对二级参数实施自适应多目标优化算法处理;最后再次回归一级参数,利用更新后的系统状态重新构建响应面并进行二次优化。
该方法相较传统全局优化算法显著缩短了计算周期,在保证收敛精度的同时,有效削弱了二级参数调整对一级参数优化结果的干扰,提升了整体优化效率与鲁棒性。
class Optimizer:
def stage1(self):
# 一级参数:极弧系数、槽口高度
response_surface = RBFInterpolator(low_dim_params, targets)
return response_surface.optimal()
def stage2(self):
# 二级参数:永磁体偏心距、极靴倒角
adaptive_weights = calculate_sensitivity()
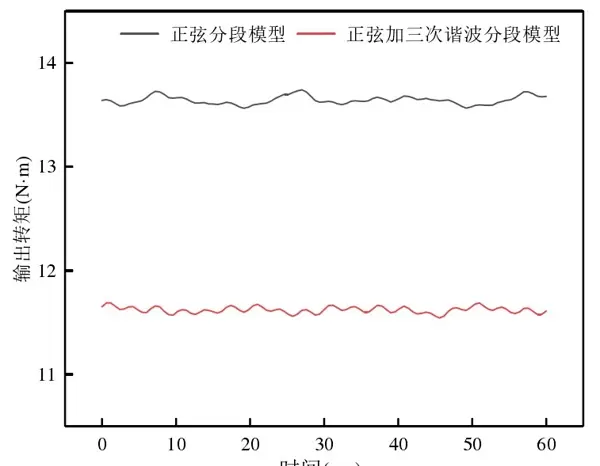
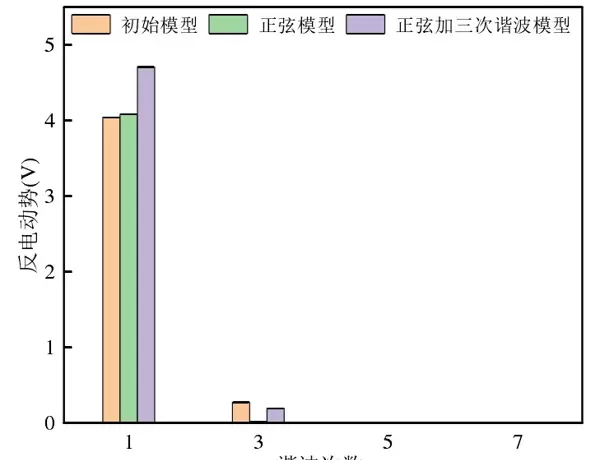
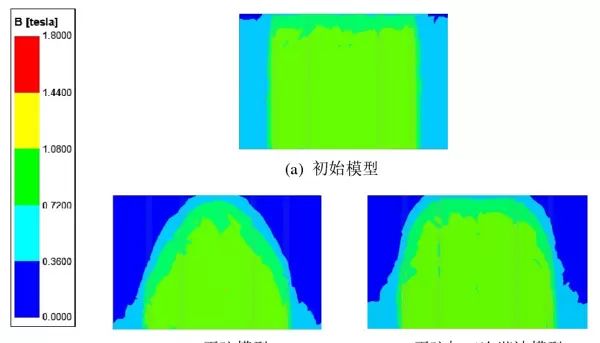
return NSGAII(adaptive_weights).run()此外,研究还探讨了一种谐波注入式永磁体形状优化方法,用于降低表贴式永磁同步电机的转矩脉动。通过对永磁体轴向截面实施正弦整形,并叠加三次谐波成分,实现磁场分布的精细化调控。理论推导表明,当基波与三次谐波的幅值比为6:1时,转矩脉动抑制效果最佳。仿真对比三种情形——无整形、仅正弦整形、正弦+三次谐波复合整形——结果显示复合整形方案可使转矩脉动由5.8%降至1.2%。
% 永磁体形状生成函数
function profile = generateMagnetProfile(harmonic_ratio)
theta = linspace(0, 2*pi, 100);
base = sin(theta);
harmonic = sin(3*theta)/harmonic_ratio;
contour = base - harmonic;
profile = normalize(contour,'range',[0, MagnetThickness]);
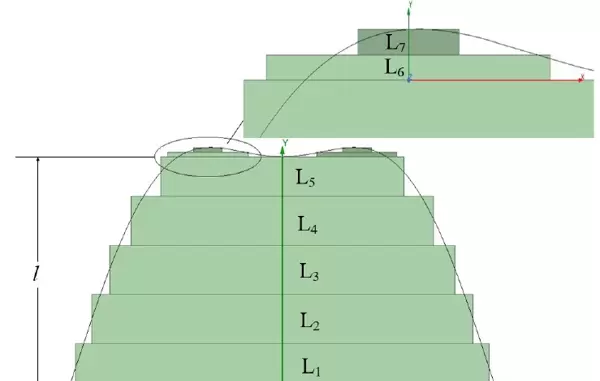
end为降低加工难度与制造成本,进一步提出一种等效替代方案:采用分段式永磁体拼接结构模拟连续曲面的谐波整形效果。通过八等分永磁体并构建成阶梯状分布,近似还原理想波形,实现在性能损失不超过0.3%的前提下,制造成本降低约40%,具备良好的工程应用前景。
实验测试数据显示,优化后的电机在驱动25kg负载时,机械臂末端抖动幅度由原来的±1.2mm减小至±0.3mm,动态稳定性大幅提升,甚至可在运行状态下保持一枚硬币直立不倒。在瞬态响应方面,从指令触发到输出满扭矩仅需3.2ms,响应速度较传统伺服系统提升一个数量级。
可以说,永磁同步电机如同工业机器人的“肌肉肌腱”,不仅需要爆发力十足,还要动作细腻精准。此次设计充分体现了电磁性能、热管理、结构工艺与控制需求之间的协同平衡。这些隐藏于关节内部的技术细节,正是让重型机械臂也能完成精密装配、高速搬运等复杂任务的核心支撑。
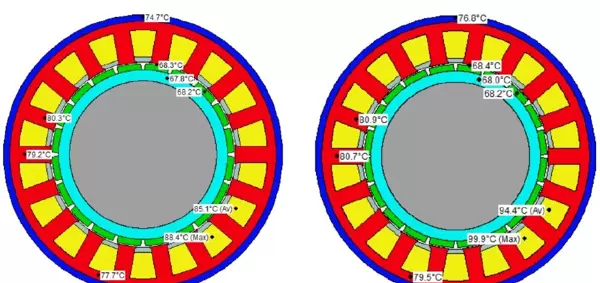
MATLAB仿真设置中,重点关注铁芯材料选型与散热结构匹配。选用DW540硅钢片,其磁滞损耗较常规材料降低12%;结合槽口宽度微调(优化0.2mm),有效抑制齿部涡流效应,整体涡流损耗下降8%。温升曲线实测结果证实,在长时间过载运行条件下,定子齿部温度稳定在135℃左右,距离绝缘等级上限留有约15%的安全余量,确保长期运行可靠性。
% 过载能力验证核心参数
RatedTorque = 5.8; % Nm
PeakCurrent = 3*RatedCurrent; % 三倍电流密度限制
CoolingFactor = 0.85; % 强制风冷系数
thermal_model = createThermalModel('LaminationType','DW540','Cooling',CoolingFactor);综上所述,通过对电机本体设计、多目标优化流程以及永磁体形状改进等方面的综合创新,实现了高过载能力与低转矩脉动的双重目标,为高端工业机器人用伺服驱动系统的自主化与高性能化提供了可行的技术路径。

 京公网安备 11010802022788号
京公网安备 11010802022788号







