


 雷达卡
雷达卡



一、电极数量:8 个
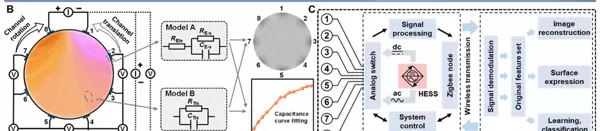
Yang 等 - 2024(可穿戴 TIT 系统)
配备 64 个数据采集通道,采用 PPPA 材料(PEDOT:PSS 与 AgNWs 复合)制成,具备良好的生物兼容性。电极集成于电子皮肤(e-skin)的边缘区域,实现柔性贴合,适应皮肤曲面变化。
采用四极测量模式,施加 40kHz 的交流激励信号,结合复合 TENG 作为信号源,总谐波失真低至 THD=0.03%。
Hardman 等 - 2025(软机器人指尖)
使用全部 1680 种四极组合进行高密度传感,电极通过弹簧加载的铜胶带实现电连接,夹持于中空指尖颈部,呈环形排布。
同样采用四极测量方式,施加 10kHz 的交流激励,系统可实现 0.88mm 的定位精度,响应力低于 0.1N。
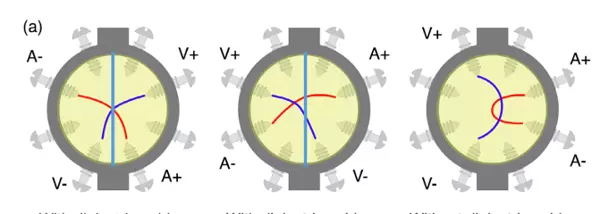
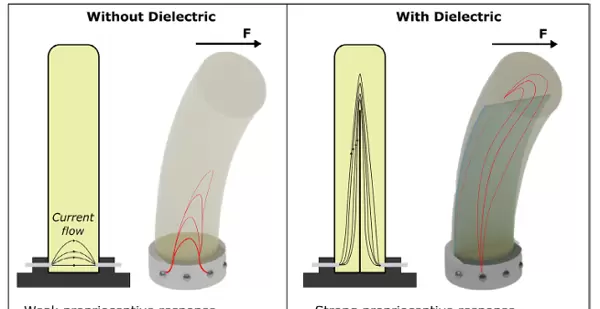
Abdulali 等 - 介电流体引导
电极共 8 个,每侧 4 个,对称固定在 3D 打印底座上,环绕导电水凝胶底部(尺寸为 12cm 高 × 3cm 直径)。
测试组包含 576 个对侧电极组合,对照组则涵盖全部 1680 种组合。
采用四极测量法,施加 1kHz 的交流激励,电极间设有 1mm 厚的硅胶介电层,使形变检测精度提升 21%。
二、电极数量:16 个
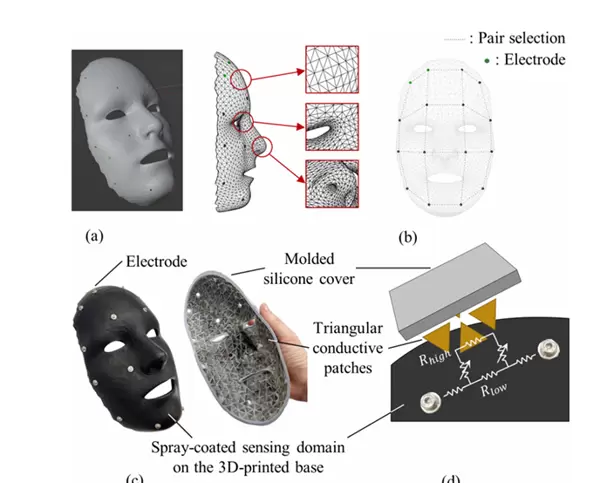
Park 等 - 2025(面部几何传感)
利用 24×24 的电压测量矩阵,共采集 576 组数据,基于四邻域电极对进行四极测量。
16 个电极以 4×4 形式对称分布于面部轮廓边界,由四面体网格结构支撑,能够适配眼睛、鼻子和嘴巴等复杂凹凸结构。
激励频率未明确说明,采用 EIT-GNN 图神经网络进行重建,平均定位误差为 5.499±2.519mm。
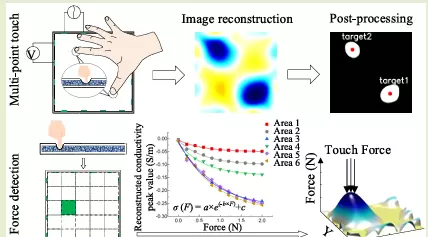
Chen 等 - 2022(大面积极触觉)
采用 120 种无重复的两终端电极组合,银制电极(10mm×40mm)均匀环形布置于传感区域外围。
实施两终端测量模式,施加 40kHz 的交流激励信号,结合 PSPNet 进行图像后处理,单点定位误差为 7.5±4.5mm。
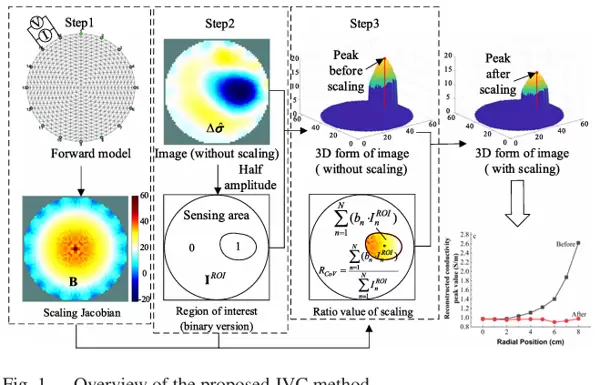
Chen 等 - 2024(力校准)
同样使用 120 个无重复的两终端组合,电极均匀分布在圆形传感器的边界,固定于 PCB 基板,并进行密封防漏处理。
采用两终端测量方式,激励频率为 40kHz,引入 JVC 校正算法,最终力估计误差为 0.37N,相对误差达 9.25%。
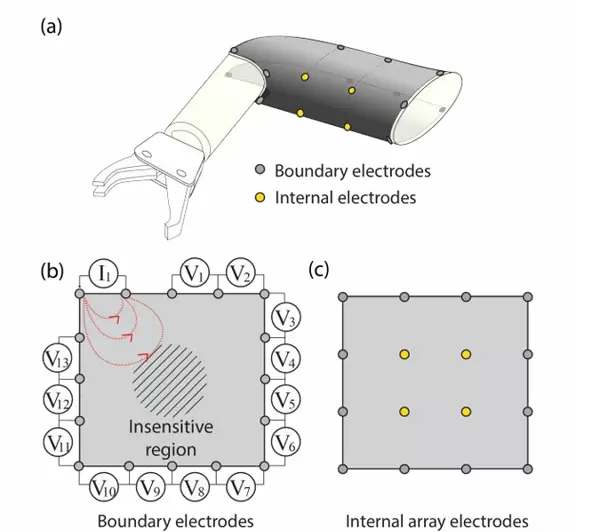
Lee 等 - 2019(内部阵列电极)
采用 120 种非重复的两终端组合,电极以 4×4 网格形式分布,包含内部阵列结构,材质为导电织物并搭配导电线束连接。
使用两终端电阻断层成像(ERT)测量方法,具体激励频率未提及,系统由 FPGA 控制,电极切换频率高达 500kHz。

 京公网安备 11010802022788号
京公网安备 11010802022788号







