


 雷达卡
雷达卡



BLDC无刷直流电机双闭环矢量控制仿真分析
本文介绍一种针对BLDC(无刷直流电机)的双闭环矢量控制仿真方案,重点展示了其结构设计、控制逻辑及性能验证过程。配套提供完整的仿真模型与说明文档,内容详尽,适合作为学习BLDC控制策略的参考资料。
一、系统结构与控制原理
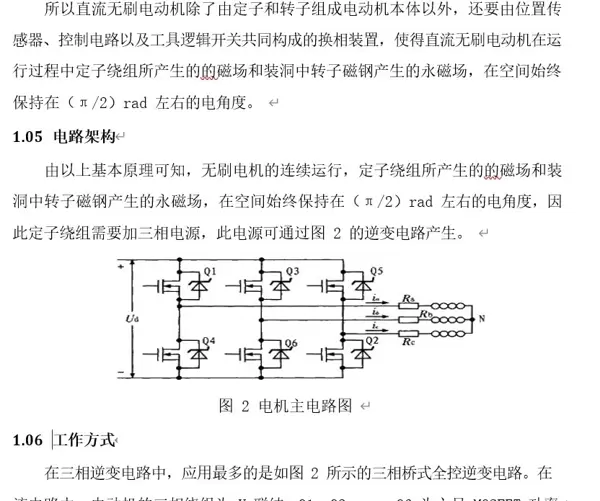
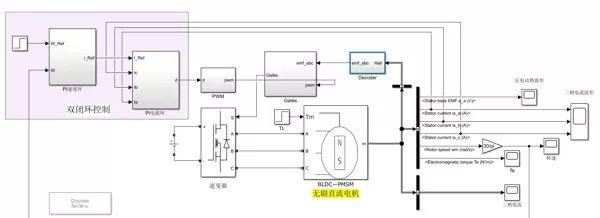
该仿真采用典型的双闭环控制架构,包含速度环和电流环两个核心反馈回路。其中,速度环负责调节电机转速,使其快速准确地跟踪设定值;电流环则用于限制并优化相电流,提升动态响应的同时增强系统的稳定性。
在控制系统中,两环协同工作:速度环输出作为电流环的输入参考,电流环通过PWM信号驱动逆变器,进而控制电机运行状态。这种分层控制方式有效提升了系统的抗干扰能力与响应精度。
二、模块化设计与文档支持
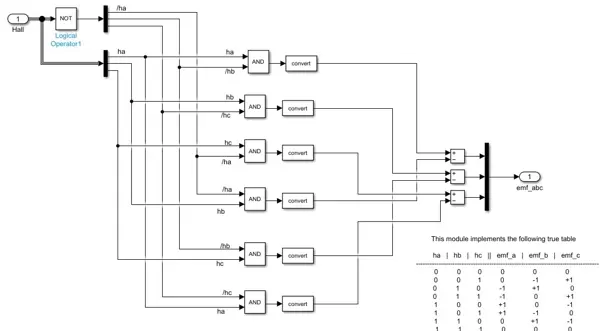
仿真项目配备了详细的说明文档,全面解析了各功能模块的搭建步骤及其作用机制。从坐标变换(如Clark变换与Park变换)到PI控制器参数整定,再到SVPWM或六步换相逻辑实现,文档均进行了条理清晰的阐述。
该文档如同一份导航图,帮助使用者理解整个控制流程的技术细节,尤其适合初学者逐步掌握BLDC矢量控制的核心概念。
三、控制性能测试方法
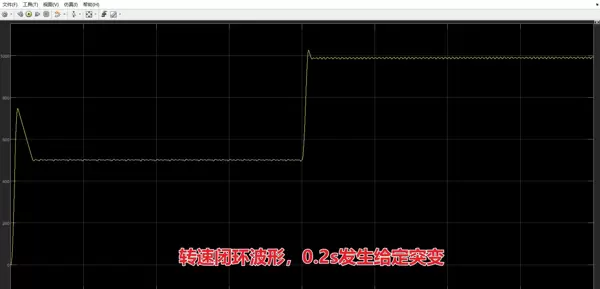
为了评估双闭环控制策略的实际效果,仿真中设置了转速突变工况。即在运行过程中突然改变目标转速,观察电机能否迅速响应并稳定运行于新设定点。
此类测试模拟了实际应用中常见的负载变化或调速需求,能够真实反映控制算法的动态性能与鲁棒性。
四、控制代码逻辑示例
以下为速度环控制部分的伪代码实现(以Python语法风格展示,具体实现环境可能有所不同):
# 定义一些参数
kp_speed = 0.5
ki_speed = 0.1
set_speed = 1000 # 给定转速
current_speed = 0
integral_speed = 0
def speed_control(new_speed):
global current_speed, integral_speed
error_speed = set_speed - new_speed
integral_speed += error_speed
output_speed = kp_speed * error_speed + ki_speed * integral_speed
current_speed = new_speed + output_speed
return current_speed代码中定义了速度环的比例系数 kp_speed 和积分系数 ki_speed,这两个参数直接影响控制器的响应速度与稳态精度。
kispeedset_speed 表示期望转速,actual_speed 为实时采样的电机转速,而 integral_error 用于存储误差的积分项。
currentintegral_speed在 speed_control 函数中,首先计算速度误差:
errorspeed随后利用PI控制律生成输出指令 output_speed,并通过更新机制调整当前转速反馈值。该过程实现了对转速偏差的持续修正,确保系统稳定跟踪目标值。
五、仿真结果分析
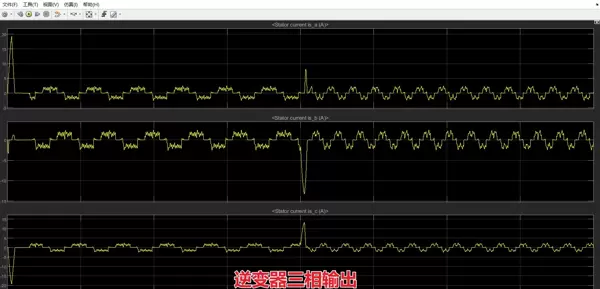
仿真实验结果显示,所采用的双闭环控制策略具备优异的动态响应特性。当给定转速发生阶跃变化时,电机能快速完成过渡过程,转速曲线平滑且无明显超调或振荡。
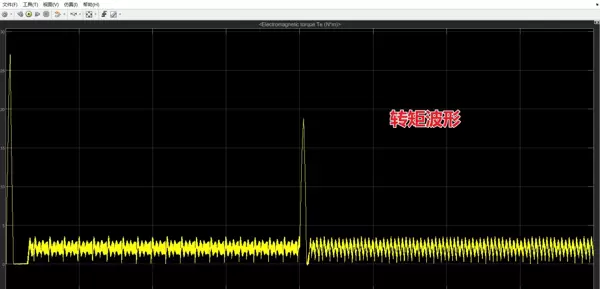
同时,电流环有效抑制了启动和变速过程中的冲击电流,保障了系统运行的安全性与效率。整体表现表明,该控制方案可高效实现BLDC电机的精确调速与稳定运行。
六、文件组成说明
本次仿真资源共包含以下三个主要部分:
- 仿真模型:完整搭建的Simulink或其他平台下的可运行模型文件,集成了电机本体、控制器、传感器反馈及驱动模块,可在虚拟环境中复现BLDC运行全过程。
- 详细说明文档:涵盖建模思路、模块功能解释、参数设置依据以及调试建议,是理解和复现仿真的关键资料。
- 相关参考文献:提供理论支撑,包括矢量控制原理、无刷电机数学模型、PI调节器设计等领域的权威资料,便于深入学习与扩展研究。
七、总结
通过对BLDC无刷直流电机双闭环矢量控制仿真的实践,不仅加深了对电机控制理论的理解,也掌握了从建模到验证的完整技术路径。该仿真系统响应速度快、跟踪性能稳定,充分验证了双闭环结构的有效性。
希望本内容能为正在学习电机控制技术的学生和爱好者提供有价值的参考,助力大家在自动化与电力电子领域不断探索前行。

 京公网安备 11010802022788号
京公网安备 11010802022788号







