


 雷达卡
雷达卡



在风电渗透率较高的电力系统中,传统的火电机组调频能力逐渐难以满足频率稳定需求。当风电并网比例超过40%时,常规机组的响应速度和调节裕度明显不足。此时,双馈风电机组通过虚拟惯性控制可快速释放转子动能,其响应速度可达传统机组的8倍以上,显著提升系统的动态频率支撑能力。
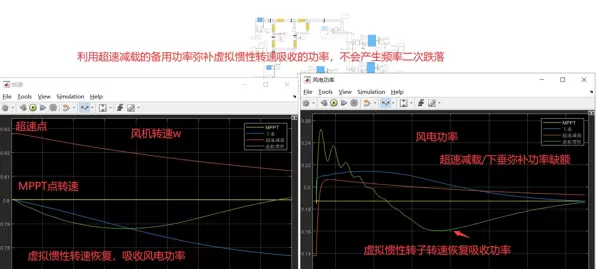
然而,虚拟惯性本质上是一种“能量借贷”机制:在频率跌落初期提供额外功率支持,但在后续转速恢复阶段会反向吸收有功功率。若该吸收过程缺乏协调控制,极易引发频率二次跌落问题。为解决这一矛盾,需引入多种调频策略协同工作机制。
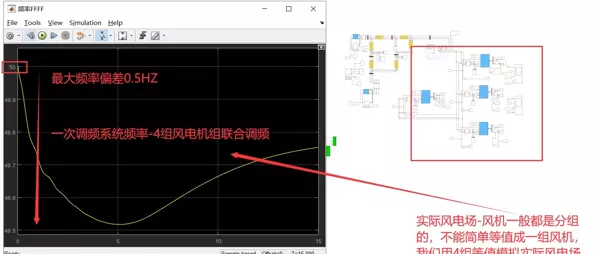
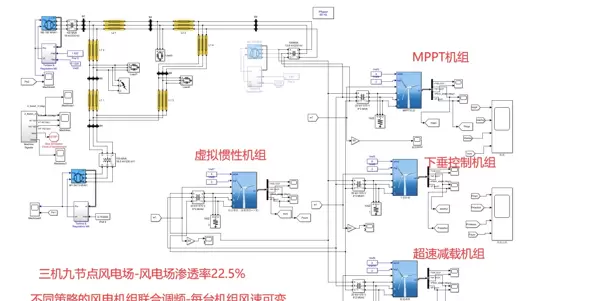
针对此问题,在三机九节点系统基础上进行了结构扩展,构建包含四组双馈风电机组的改进型仿真模型,用以模拟实际风电场运行场景。每组风机配置不同的调频策略,实现多模式协调控制。
核心控制逻辑包括虚拟惯性、超速减载与下垂控制三种机制的时序配合:
- 虚拟惯性控制:在频率扰动发生的前5秒内迅速响应,利用转子储能提供瞬时功率支撑;
- 超速减载控制:在风速条件允许时,将部分机组运行点从最大功率追踪曲线转移至预留备用功率区,提前准备可调度容量;
- 下垂控制:在转速恢复阶段主动注入补偿功率,抵消虚拟惯性引起的反向功率吸收,避免系统频率再次下降。
为实现上述功能,设计了相应的Simulink控制模块,并嵌入动态参数调节机制。以下为虚拟惯性环节中用于转速补偿的核心代码片段:
function [P_add] = VirtualInertia(delta_f, H_v, K)
persistent omega_r_prev;
if isempty(omega_r_prev)
omega_r_prev = 1.2; % 初始转速1.2pu
end
T_v = 10; % 虚拟惯性时间常数
delta_omega = (K * delta_f - (omega_r_prev - 1)) / T_v;
P_add = 2 * H_v * delta_omega;
omega_r_prev = omega_r_prev + delta_omega * 0.1; % 0.1秒步长更新
end其中,H_v表示虚拟惯性系数,K为下垂控制系数。当系统检测到频率偏差超过0.2Hz时,自动触发超速减载模式,调整风机运行工作点,确保有足够的功率裕度参与后续调节。
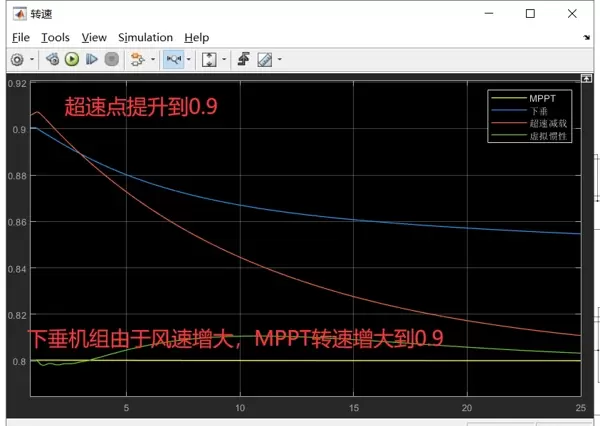
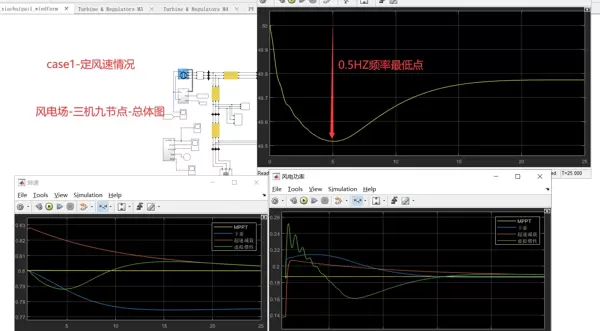
调频策略间的协调关键在于功率补偿的时间匹配。如图所示,展示了三种控制方式联合运作下的频率响应效果:
 ![频率响应曲线对比图]
![频率响应曲线对比图]
红线代表单一使用虚拟惯性的频率响应曲线,存在明显的二次跌落现象;而蓝线对应采用协调控制策略的情况,通过在转速恢复期提前叠加下垂控制输出,有效抑制了频率反弹,实现了更平稳的恢复过程。
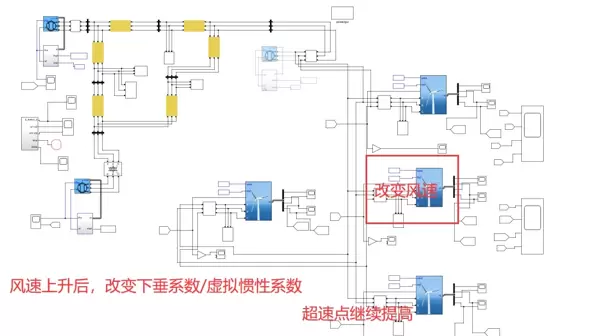
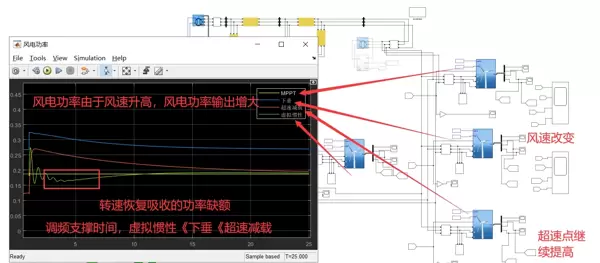
案例2重点考察变风速工况下的控制性能。当风速由8m/s突增至11m/s时,传统控制策略仍专注于最大功率追踪,无法及时响应系统频率需求。本方案则通过协调机制,使部分机组主动降低出力约10%,预留出可用功率作为动态备用。
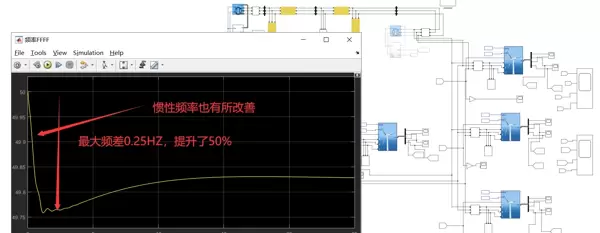
仿真结果表明,在高比例风电接入背景下,该策略使系统频率最低点由49.2Hz提升至49.8Hz,改善幅度达50%,显著增强了电网对频率波动的抵御能力。
最后分享一个实用的参数优化技巧:在Simulink环境中进行参数扫描测试时,建议对虚拟惯性的时间常数T_v引入自适应调整机制。当风速变化超过2m/s时,将T_v从初始值10秒动态下调至5秒,既能防止因延迟响应导致的功率反调,又能维持转子转速的稳定性。
具体实现方法是在风速检测模块后接入一个简易的模糊逻辑控制器,仅需编写约二十行代码即可完成逻辑部署,但控制效果提升十分显著。

 京公网安备 11010802022788号
京公网安备 11010802022788号







