


 雷达卡
雷达卡



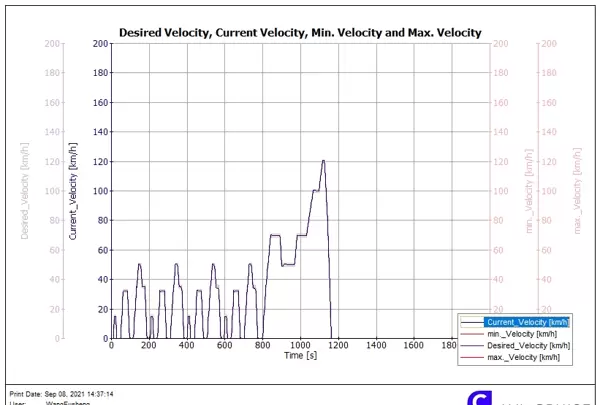
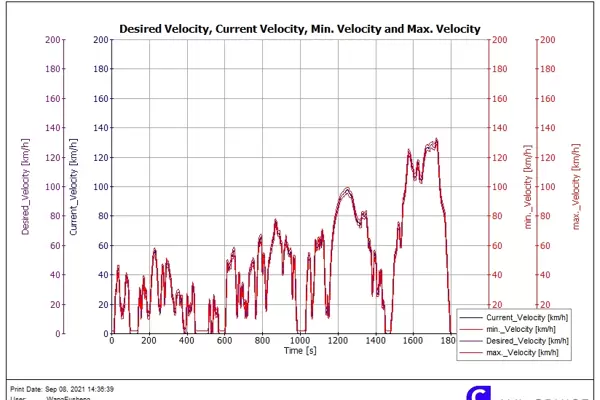
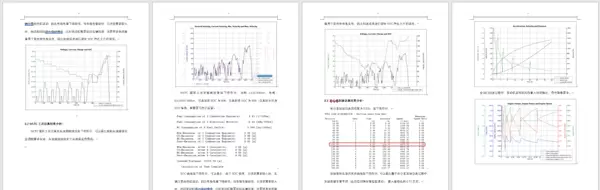
在混合动力汽车的研发过程中,仿真技术扮演着至关重要的角色。本文介绍一种基于Cruise与Simulink联合搭建的P2并联混动仿真系统,可用于开展车辆动力性能及燃油经济性分析,是深入掌握混动控制逻辑的理想学习平台。
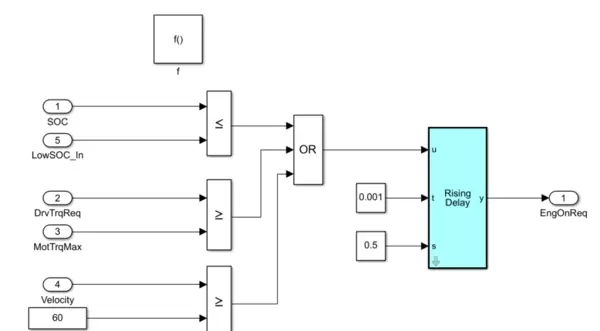
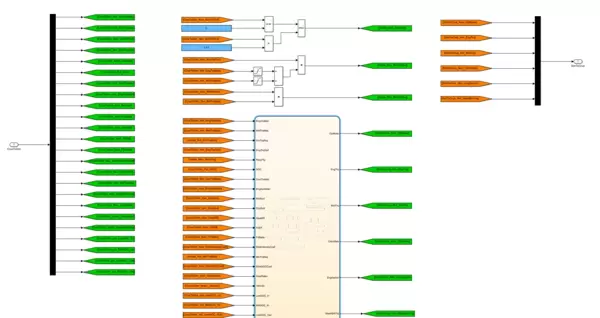
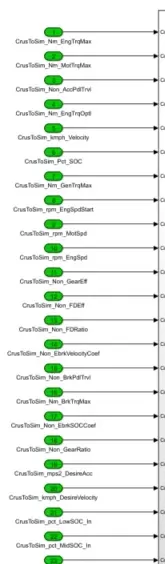
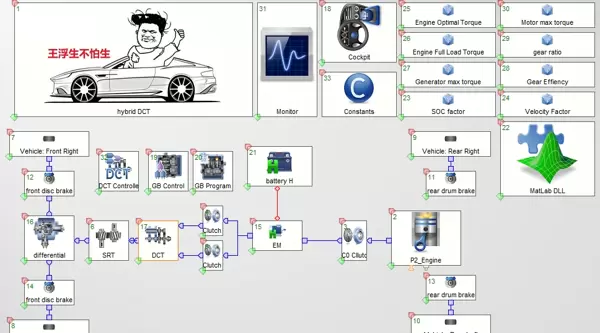
该仿真体系的核心架构由CRUISE和Simulink协同构建而成。其中,整车动力学模型在CRUISE环境中建立,而控制策略部分则完全基于MATLAB/Simulink平台开发。策略模型通过C++编译器转化为dll动态链接库文件,供CRUISE调用,从而实现两个软件间的联合仿真运行。这种集成方式充分发挥了Simulink在控制算法设计方面的优势,以及CRUISE在整车系统级仿真中的高精度特性。
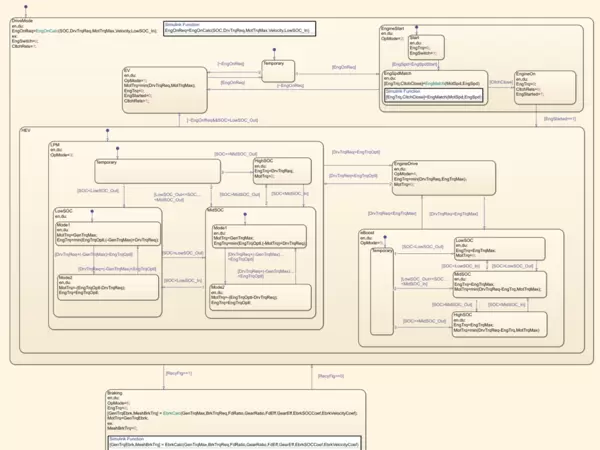
为了提升可读性和理解效率,控制逻辑主要采用Stateflow进行建模。Stateflow作为Simulink的重要组件,提供了图形化的状态机设计环境,特别适合表达复杂模式切换行为。借助其可视化界面,用户可以清晰观察到不同驱动模式(如纯电、混合驱动、再生制动等)之间的转换过程,有助于快速掌握混动系统的运行机制。
% 示例:Stateflow中的模式切换
chart = Stateflow.Chart;
state1 = Stateflow.State(chart, 'State1');
state2 = Stateflow.State(chart, 'State2');
transition = Stateflow.Transition(state1, state2);
transition.setCondition('event == 1');例如,在Stateflow中可构建包含多个工作状态的状态机模型,并通过设定事件触发条件实现自动跳转。上述代码示例展示了一个具备两个状态及事件驱动转换的基本结构,这类设计广泛应用于模拟混动系统的工作模式切换流程。
配套提供的策略说明文档约16页,全面阐述了控制策略的设计思路、各运行模式的定义及其切换判据。内容涵盖启停逻辑、扭矩分配原则、模式进入与退出条件等关键点,对于理解整个仿真系统的运作原理具有重要参考价值,建议使用者在操作前认真研读。
需要特别说明的是,本模型定位于教学与研究用途,不具备直接工程化应用的能力。由于不同车型的动力配置、参数设定和控制需求存在显著差异,因此不可期望“即插即用”。实际使用时,应根据具体仿真目标对模型结构和参数进行相应调整与优化。
此外,该资源不包含任何软件操作教学内容,要求使用者已具备CRUISE、Simulink及相关工具链的基本操作能力。若缺乏必要的软件基础,可能会影响模型的正确加载与调试。
所有相关资料均完整提供,包括:CRUISE整车仿真模型文件、Simulink控制策略模型源文件、以及详细的策略说明文档。这些材料共同构成了一个完整的仿真学习包,便于用户从结构到逻辑进行全面剖析。
综上所述,该P2并联混动仿真模型不仅支持对混合动力系统动力性与经济性的定量评估,更为控制策略的学习与验证提供了可靠平台。无论是高校科研还是企业技术预研,都可借此深化对混动系统工作原理的理解。
关于模型的基本信息如下:
- 基于CRUISE/Simulink联合仿真的base架构;
- 控制策略由Simulink开发,经C++编译为dll供CRUISE调用;
- 核心逻辑使用Stateflow实现,便于理解模式切换过程;
- 附带约16页策略说明文档,详细解析控制逻辑与模式转换机制;
- 仅用于学习交流,需根据实际车型需求自行修改适配;
- 非教学教程,要求使用者具备相应软件基础;
- 提供全部源文件:CRUISE模型、Simulink策略模型、说明文档。

 京公网安备 11010802022788号
京公网安备 11010802022788号







