


 雷达卡
雷达卡



一、前言
今日更新如期而至,学习之路永无止境。
二、核心内容
SURF算法概述(加速鲁棒特征)
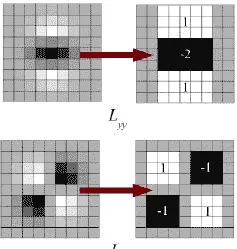
SURF(Speeded Up Robust Features)是一种在2006年由Bay H.、Tuytelaars T. 和 Van Gool L. 提出的图像特征提取方法。该算法作为SIFT的快速替代方案被广泛研究与应用。相较于SIFT中使用的高斯差分(DoG)来逼近高斯拉普拉斯算子(LoG),SURF采用盒状滤波器进行近似处理,从而显著提升了计算效率。
得益于积分图像技术,盒状滤波器可在多尺度空间中高效完成卷积运算。同时,SURF利用Hessian矩阵的行列式来定位关键点及其对应尺度。
主方向计算与Upright-SURF模式
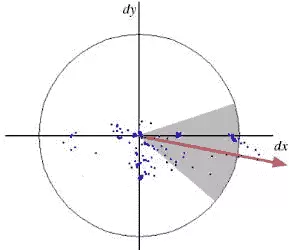
为了确定主方向,SURF对以关键点为中心、半径为6s(s表示关键点的尺度)的圆形区域内执行Haar小波响应分析,并使用高斯函数对响应值加权。随后,通过一个角度跨度为60度的滑动窗口统计总响应,进而估算出主方向。
值得注意的是,借助积分图像,任意尺度下的小波响应均可快速获取。对于无需旋转不变性的应用场景,可以跳过方向计算步骤,从而进一步提升处理速度——这种变体被称为Upright-SURF或U-SURF。
OpenCV支持两种模式切换,取决于upright标志位设置:当其值为0时,启用方向计算;若设为1,则关闭方向检测,提高运行效率。
特征描述子构建机制
在描述子生成阶段,SURF基于关键点周围20s×20s大小的邻域区域,利用水平和垂直方向的小波响应构造特征向量。该区域被划分为4×4个子块,每个子块内分别累加dx、dy及其绝对值,形成如下形式的向量:
\(\langle v = \sum d_x, \sum d_y, \sum |d_x|, \sum |d_y|\rangle\)。
最终得到一个64维的特征描述子。相比SIFT,维度降低带来了更快的匹配速度,同时仍保持良好的独特性。
为进一步增强区分能力,SURF还提供了扩展版本——128维描述子。具体做法是根据dy的正负分别求和dx与|xdx|,同样地,|dy|和|dx|也依据dx的符号进行分类统计,使特征数量翻倍而不显著增加计算负担。
在OpenCV中,可通过设置extended标志位控制输出维度:0代表64维,1则启用128维(默认开启)。
SURF性能特点与适用场景
SURF在设计上采用了多种优化策略,实测表明其运行速度约为SIFT的三倍,在模糊及旋转图像中表现稳健。然而,在视角变换明显或光照条件剧烈变化的情况下,其稳定性有所下降。
OpenCV中的SURF实现
OpenCV为SURF提供了完整的接口支持,类似于SIFT的使用方式。用户可通过设定参数(如描述子维度、是否启用Upright模式等)创建SURF对象,然后调用SURF.detect()和SURF.compute()等方法完成关键点检测与描述子计算。
以下是一个简单的Python终端示例,用于演示如何提取并可视化SURF特征:
import cv2 as cv
# 读取图像,第二个参数0表示以灰度模式读取
img = cv.imread('fly.png', 0)
# 创建SURF对象,设置Hessian阈值为400
# Hessian阈值用于控制特征点检测的灵敏度
# 值越高,检测到的特征点越少但更稳定
surf = cv.xfeatures2d.SURF_create(400)
# 检测关键点并计算描述子
# kp: 关键点列表(包含位置、尺度、方向等信息)
# des: 描述子矩阵(每行是一个特征点的描述向量)
kp, des = surf.detectAndCompute(img, None)
# 打印检测到的关键点数量
print(len(kp)) # 输出:699关键点数量控制与阈值调整
原始检测结果包含1199个关键点,数量过多不利于图像标注。因此我们通过提高Hessian矩阵的行列式阈值,将关键点数量减少至约50个以便于显示。尽管在后续匹配任务中可能需要保留更多特征,但在可视化阶段此操作更为合理。
import cv2
# 读取图像
img = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 初始化SURF检测器
surf = cv2.xfeatures2d.SURF_create()
# 检查当前Hessian阈值
print(surf.getHessianThreshold())
# 设置新的Hessian阈值
surf.setHessianThreshold(50000)
# 检测关键点和计算描述子
kp, des = surf.detectAndCompute(img, None)
# 输出关键点数量
print(len(kp))| 阈值 | 检测到的关键点数量 | 说明 |
|---|---|---|
| 400 | 699个 | 正常设置,检测到较多特征点 |
| 50000 | 47个 | 极高阈值,仅保留最显著的特征点 |
从结果可见,SURF更倾向于识别斑点类结构,例如蝴蝶翅膀上的白色区域即被成功捕捉。

U-SURF模式测试效果
接下来尝试启用U-SURF模式,即不计算关键点方向。此时所有特征点的方向均保持一致,呈现出统一朝向。
import cv2
import matplotlib.pyplot as plt
# 读取图像
img = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 创建 SURF 对象
surf = cv2.xfeatures2d.SURF_create()
# 检查 upright 标志
print(surf.getUpright())
# 如果 upright 为 False,设置为 True
if not surf.getUpright():
surf.setUpright(True)
# 重新计算特征点
kp = surf.detect(img, None)
# 绘制特征点
img2 = cv2.drawKeypoints(img, kp, None, (255, 0, 0), 4)
# 显示结果
plt.imshow(img2)
plt.show()结果显示处理速度进一步提升。对于不需要旋转不变性的任务(如全景图像拼接),U-SURF是更优选择。

建议将今天的代码在 Python 的编译环境中运行,经过多次尝试后发现,在虚拟环境中直接执行往往无法成功。
本次更新内容较为简洁,旨在帮助大家更好地消化和理解前期所学知识。
我们终此一生,就是要摆脱他人的期待,找到真正的自己。—— 伍绮诗《无声告白》

 京公网安备 11010802022788号
京公网安备 11010802022788号







