


 雷达卡
雷达卡



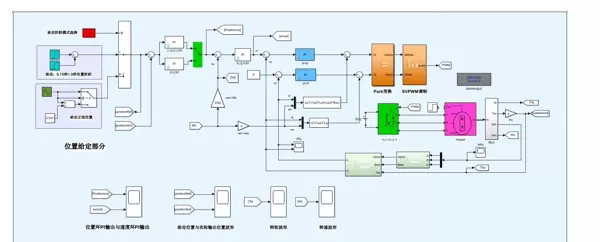
永磁同步电机位置环、转速环、电流环三闭环控制Matlab仿真(带说明文档)
本文将详细介绍基于Matlab的永磁同步电机(PMSM)三闭环控制仿真的搭建过程及关键参数调节方法,附有详细的说明文档。该仿真模型包括位置环、转速环和电流环三个环节,能够实现高精度的电机运行控制。
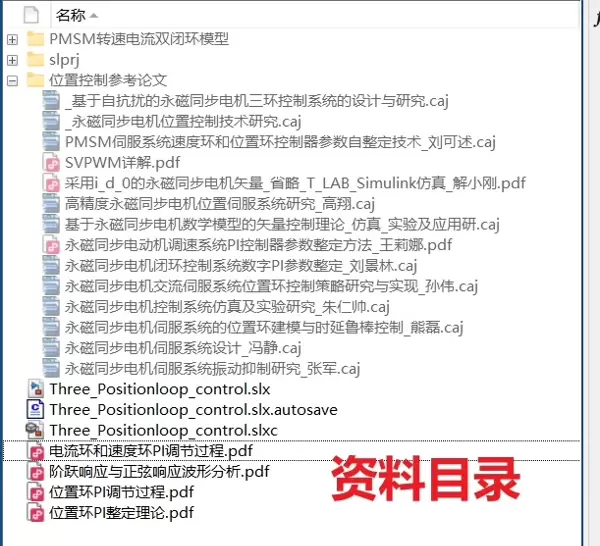
资料内容
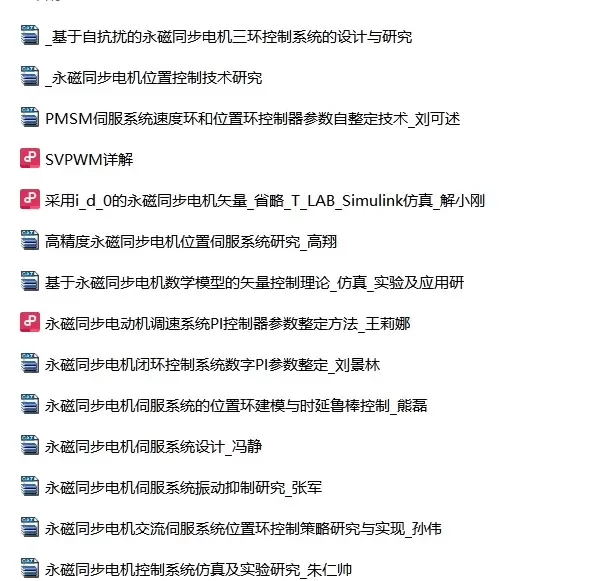
- 搭建仿真过程的参考文献
- 整理的位置环PI、转速环PI、电流环PI参数调节及位置环整定说明文档
- PMSM转速电流双闭环模型学习
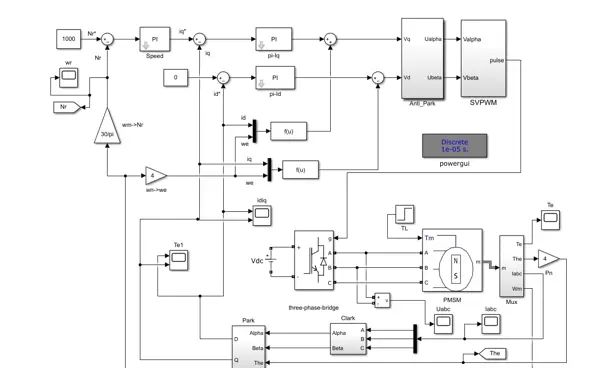
三闭环控制系统的结构与仿真工况
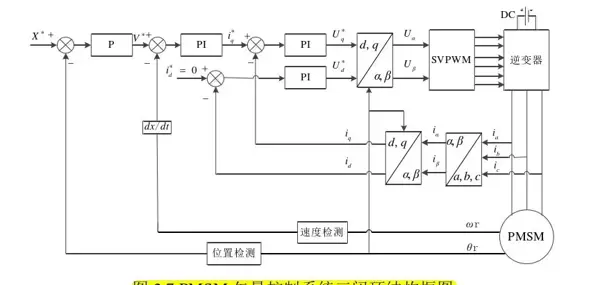
在电机控制领域,PMSM因其高效、节能等优点被广泛应用。三闭环控制策略(位置环、转速环、电流环)能够使PMSM实现高精度的运行控制。
基于转子磁链定向矢量控制的三环PID位置控制系统中,电流环作为内环,速度和位置环组成最外层的双闭环。整个系统通过三个环节协同工作,确保电机在各种工况下都能保持稳定和精确的运行。
仿真工况包括两种模式的位置给定:
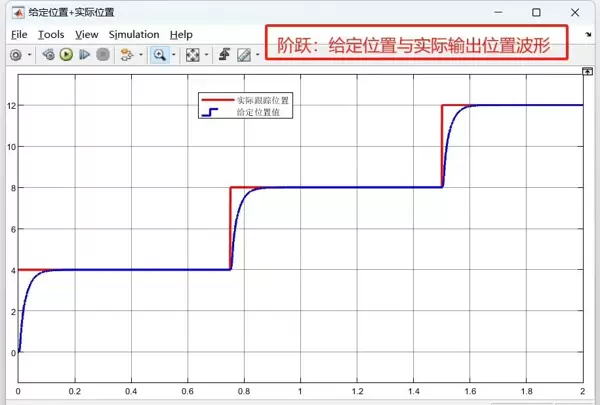
- 阶跃式:模拟快速响应的场景,观察电机对突变位置指令的跟踪能力。
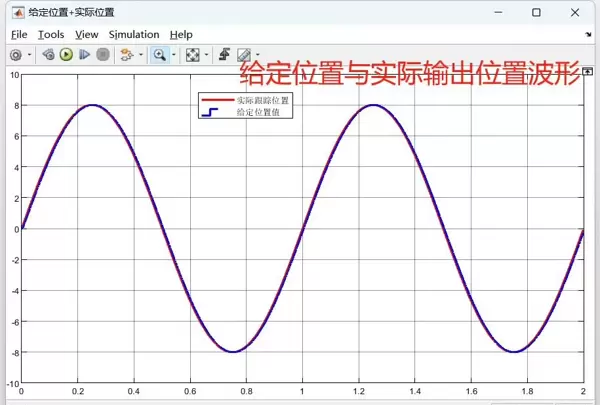
- 正弦式:测试电机在连续变化的位置指令下的动态性能。
搭建仿真参考依据
为了准确地搭建PMSM三闭环控制仿真模型,我们需要参考大量的文献资料。这些资料可以是学术期刊、专业书籍或技术报告。例如,《永磁同步电机控制技术》一书详细介绍了电机的数学模型和控制策略,为仿真模型的构建提供了理论基础。
PI参数调节与整定说明
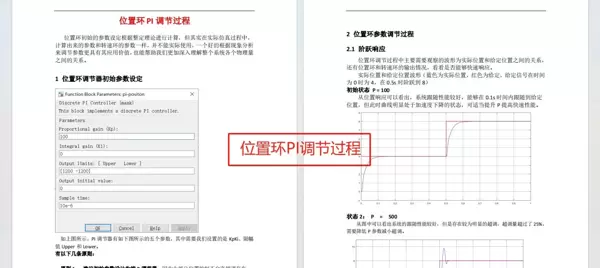
位置环PI参数调节
位置环的主要任务是使电机的实际位置尽可能地跟踪给定的位置。在Matlab仿真中,可以通过设置位置环的PI控制器来实现这一目标:
Kp_pos = 10; % 比例系数
Ki_pos = 0.1; % 积分系数
pos_controller = pid(Kp_pos, Ki_pos);比例系数 \( Kp_{\text{pos}} \) 决定了控制器对位置偏差的快速响应程度。如果 \( Kp_{\text{pos}} \) 过大,系统可能会出现超调;而积分系数 \( Ki_{\text{pos}} \) 用于消除稳态误差。如果 \( Ki_{\text{pos}} \) 太小,误差消除会比较慢。
Kppos转速环PI参数调节
转速环确保电机的转速能稳定在给定值附近。可以通过设置转速环的PI控制器来实现这一目标:
Kp_speed = 5;
Ki_speed = 0.05;
speed_controller = pid(Kp_speed, Ki_speed);比例系数 \( Kp_{\text{speed}} \) 影响着转速对偏差的响应速度,而积分系数 \( Ki_{\text{speed}} \) 帮助系统克服负载扰动带来的转速波动,使转速能更平稳地跟踪给定值。
Kispeed电流环PI参数调节
电流环作为内环,其响应速度要求更快,以保障电机快速且稳定地运行。可以通过设置电流环的PI控制器来实现这一目标:
Kp_current = 20;
Ki_current = 1;
current_controller = pid(Kp_current, Ki_current);电流环的比例系数 \( Kp_{\text{current}} \) 和积分系数 \( Ki_{\text{current}} \) 通常设置较大,以便快速调整电流,应对电机运行过程中的各种动态变化。
current位置环整定说明
位置环的整定过程涉及不断尝试和调整 \( Kp_{\text{pos}} \) 和 \( Ki_{\text{pos}} \) 的值,以观察系统的响应。例如,初始设置 \( Kp_{\text{pos}} \) 较小,可能会发现系统对位置变化响应迟缓,实际位置与给定位置偏差较大;增大 \( Kp_{\text{pos}} \) 后,响应变快,但可能出现超调,这时需要调整 \( Ki_{\text{pos}} \) 来慢慢消除稳态误差,直到系统达到理想的位置跟踪效果。
Ki_posPMSM转速电流双闭环模型拓展到三环PID位置控制系统
在PMSM的转速电流双闭环模型基础上,进一步扩展为三环PID位置控制系统,显著提升了控制精度。整个系统采用三环控制结构:电流环作为内层,速度环位于中间,位置环作为最外环。
仿真工况展示
阶跃式给定位置
在Matlab中设置阶跃式给定位置的代码如下:
t = 0:0.001:1; % 时间向量
position_ref_step = [zeros(1, 100) ones(1, 901)]; % 前0.1秒位置为0,之后为1通过仿真可以看到,电机实际输出位置在短暂过渡后,能快速稳定地跟踪上给定的阶跃位置。这得益于三个闭环的协同工作:电流环快速调整电流,转速环根据电流和负载调整转速,位置环最终使位置达到给定值。
正弦式给定位置
position_ref_sine = sin(2*pi*5*t); % 5Hz的正弦给定位置对于正弦式给定位置,电机实际输出位置也能很好地跟踪,实时贴合正弦曲线的变化。这显示了三环PID控制系统的良好动态性能,无论给定位置如何变化,都能让电机精准响应。
总结
通过本次Matlab仿真及整理的说明文档,我们对永磁同步电机的三闭环控制有了更深入的理解和实践经验。希望本文能给研究电机控制领域的小伙伴们带来一些启发和帮助。

 京公网安备 11010802022788号
京公网安备 11010802022788号







