


 雷达卡
雷达卡



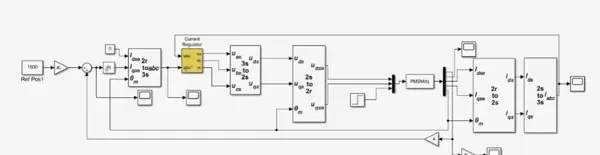
基于Simulink的永磁同步电机(PMSM)矢量控制实现
在研究永磁同步电机(PMSM)控制系统的过程中,利用Simulink搭建矢量控制模型是一种高效且直观的方法。本文将介绍如何基于PMSM的数学模型,在Simulink中实现完整的矢量控制策略,涵盖建模、双闭环控制设计以及状态变量的估算方法。
1. 搭建PMSM电机系统模型
矢量控制的核心基础是准确的电机数学模型。为了在仿真环境中真实反映PMSM的动态行为,需依据其电压方程、磁链关系和机械运动方程构建对应的Simulink模型。该模型通常包括定子电压方程、转子磁链表达式以及描述转速与电磁转矩之间关系的动力学方程。
通过合理配置这些方程模块,可以在仿真中精确模拟电机在不同工况下的响应特性,为后续控制器设计提供可靠平台。
% PMSM电压方程
Vd = Rs * Id + Ld * dId/dt - omega * Lq * Iq;
Vq = Rs * Iq + Lq * dIq/dt + omega * (Ld * Id + psi_f);2. 双闭环PI解耦控制策略设计
在控制结构上,采用经典的双闭环架构:外环为转速环,内环为电流(转矩)环,两者均使用PI调节器进行反馈控制。这种结构能够实现d轴与q轴之间的有效解耦,从而提升系统的动态响应性能和稳态精度。
其中,转速外环根据实际转速与设定值的偏差输出期望的q轴电流指令;而转矩内环则通过调节d、q轴电压实现对电流的快速跟踪。该控制逻辑可通过Simulink中的PID Controller模块或自定义S函数实现。
% 转速外环PI调节器
Kp_speed = 0.1;
Ki_speed = 0.01;
speed_error = speed_ref - speed_actual;
torque_ref = Kp_speed * speed_error + Ki_speed * integral(speed_error);3. 基于EKF与AEKF的状态估计算法
在无传感器控制应用中,获取转子的电角度和机械转速是一个关键问题。为此,引入了扩展卡尔曼滤波(EKF)及其改进版本——自适应扩展卡尔曼滤波(AEKF)算法,用于在线估算难以直接测量的状态变量。
EKF通过对非线性系统进行局部线性化处理,结合噪声统计信息,实现对转子位置和速度的高精度估计。AEKF进一步优化了噪声协方差的自适应调整机制,增强了系统在参数变化或外部扰动下的鲁棒性。
% EKF算法
function [theta_est, omega_est] = EKF(Id, Iq, Vd, Vq, Ts)
% 状态方程
x_est = [theta_est; omega_est];
F = [1 Ts; 0 1];
x_pred = F * x_est;
% 观测方程
H = [1 0];
y_pred = H * x_pred;
% 更新步骤
K = P_pred * H' / (H * P_pred * H' + R);
x_est = x_pred + K * (y_meas - y_pred);
P_est = (eye(2) - K * H) * P_pred;
theta_est = x_est(1);
omega_est = x_est(2);
end4. 观测器实现方式与代码规范性说明
在Simulink中实现上述观测器时,采用了静态变量定义的方式编写核心算法模块。这种方式不仅提高了代码的可读性和模块化程度,也便于后期调试与功能扩展。
整个项目文档完整,函数命名清晰,注释详尽,符合工程开发标准,有助于用户理解算法原理并进行个性化修改。
% 静态变量定义
persistent theta_est omega_est;
if isempty(theta_est)
theta_est = 0;
omega_est = 0;
end总结
本方案展示了从PMSM数学建模到矢量控制实现的完整流程,结合双闭环PI控制与先进的状态估计算法,构建了一个高性能的仿真控制系统。整个过程突出了理论与实践的结合,适用于教学研究及工程原型开发。
通过对各模块的合理组织与参数整定,能够有效提升永磁同步电机的控制精度与运行稳定性。希望此内容能为相关领域的学习者和开发者提供有价值的参考。

 京公网安备 11010802022788号
京公网安备 11010802022788号







