


 雷达卡
雷达卡



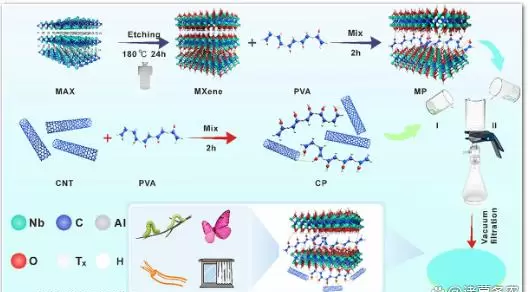
MP/CP双层膜制备技术
非接触式传感技术涵盖多种材料体系,其功能实现依赖于多样化的敏感材料与结构设计:
1. 光学响应材料
聚合物分散液晶(PDLC):被应用于JAIST开发的ProTac系统中,通过电场调控实现透明与不透明状态之间的快速、可逆切换,是视觉与触觉融合感知的关键组件。
弹性光学硅胶:广泛用于GelSight类触觉传感器,作为具备高折射率、柔软性和内嵌反光颗粒的“人工皮肤”。其力学参数(如弹性模量和断裂伸长率)以及光学特性直接影响传感精度和使用寿命。
2. 柔性导电与电极材料
液态金属(如镓铟合金):具备优异的延展性与导电性能,适用于可拉伸电路。新型LM-MMT复合墨水提升了打印分辨率与图案长期稳定性。
银纳米线(AgNWs)、碳纳米管(CNTs):常用于柔性透明电极制备。其中AgNWs在透光性与导电性方面表现突出,而CNTs还兼具良好的机械耐久性。
3. 功能型敏感材料
压电材料(如PZT, PVDF, Sm-PMN-PT):可将外部施加的应力转化为电信号,广泛应用于振动与声音检测场景。
热释电材料:对温度变化具有高度响应能力,可用于非接触式温度测量。研究显示,通过拓扑结构设计优化铁电纳米复合材料(如Sm-PMN-PT/PDMS),能显著增强其压电与热释电响应性能。
磁致伸缩材料:在外加磁场作用下发生形变,适用于磁场强度探测。
4. 基底与封装材料
聚二甲基硅氧烷(PDMS):一种常见的弹性基材,具有优良的柔韧性、生物相容性及化学稳定性,适合用于柔性器件构造。
聚酰亚胺(PI)、聚对苯二甲酸乙二醇酯(PET):具备出色的力学强度、耐高温性能和绝缘特性,常用于柔性电子线路板的制造。
5. 多功能一体化材料
诸如MXene和碳纳米管薄膜等材料不仅具备导电性,其独特的微观结构或光电行为使其本身即可作为多物理场或化学刺激的直接感应介质。
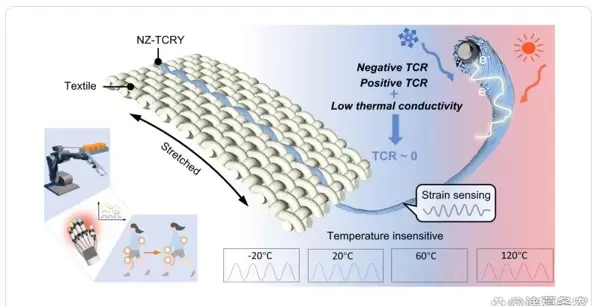
NZ-TCRY拉力传感器的设计与性能
二、材料与技术的核心要求
非接触式传感对所用材料提出极高标准,主要体现在以下维度:
1. 高灵敏度与精确响应
材料需对外界微弱刺激(如细微光照波动、毫米波相位偏移、微小温差)产生显著反应,以保障检测精度与空间分辨率。
2. 快速响应速度
材料状态转换或信号传递必须迅速,满足实时交互需求。例如PDLC可在毫秒级完成光学状态切换。
3. 优越的机械适应性
柔韧/可拉伸性:为适配复杂曲面或动态形变环境,材料应具备良好的弹性变形能力。
耐久性与抗疲劳性:在反复拉伸、压缩循环中保持性能稳定,避免因老化导致功能退化。
4. 环境适应能力
材料应在不同温湿度条件下维持性能一致性,并抵抗环境老化影响。例如北京理工大学研发的纯水系抗冻水凝胶可在-30℃仍保持柔性和导电性。
5. 可加工性与集成兼容性
材料需支持微纳尺度加工与图形化处理(如LM-MMT墨水提升打印精度),便于构建高密度传感阵列,并实现与机器人本体的一体化集成。
6. 多模态感知潜力
理想材料应能同时响应力、热等多种激励,并通过结构设计实现各信号的有效分离,降低系统集成复杂度。
7. 成本可控性
在确保性能的基础上,材料与制造成本应尽可能低,这是推动技术大规模落地的重要前提。成本控制与产业化推广互为支撑。
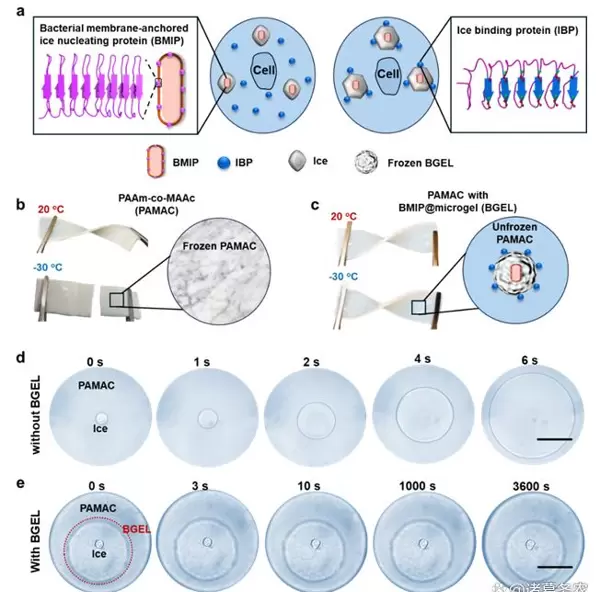
纯水系抗冻水凝胶的设计及其冰晶调控策略
三、理想材料与技术发展方向
未来理想的材料体系应朝“单一材料、多重功能”的方向发展,即一种材料或结构可同时承担多种感知任务,并全面满足前述各项严苛指标:
1. 仿生多功能集成材料
借鉴生物感知机制,开发能够同步识别压力、温度、湿度等多维刺激的材料。例如利用介电泳技术精准排列铁电陶瓷填料于聚合物基体中,可协同增强压电与热释电效应,实现机械-热耦合感知。
2. 外场可调型动态材料
类似ProTac中的PDLC材料,其物理属性(如透光率)可通过电、光或热信号实现快速且可逆调节,从而支持感知模式切换或自适应环境响应。
3. 高性能柔性导体
包括液态金属复合材料(如LM-MMT墨水)及银纳米线/CNT体系,目标是在大应变拉伸状态下维持高电导率,并易于图案化与系统集成。
4. 自供能感知材料
基于压电、摩擦电或热释电效应,将环境中存在的机械运动或热梯度直接转化为可用电信号,减少对外部电源的依赖,提升系统续航与集成自由度。
5. 高效柔性封装解决方案
需要开发既能有效保护内部敏感元件,又不对感知信号造成屏蔽的封装材料——例如对特定波段光或电磁波保持透明性的柔性屏障层。
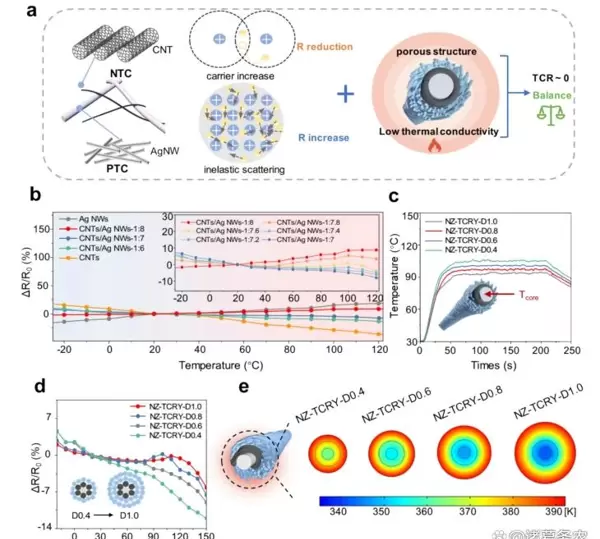
NZ-TCRY传感器温度响应灵敏性
四、当前材料与技术面临的瓶颈
尽管已有诸多进展,但若干关键限制因素仍制约着非接触式传感性能的进一步突破:
1. 材料本征性能间的矛盾
灵敏度与量程难以兼顾:多数材料在实现超高灵敏度的同时往往牺牲了测量范围,反之亦然。
柔韧性与耐久性冲突:高度柔性的材料可能在长期循环载荷下出现疲劳开裂或性能衰减。
多模态信号串扰问题:当多种敏感材料共存时,不同物理信号之间易发生交叉干扰,难以准确解耦。
2. 环境稳定性不足
许多柔性电子材料在极端条件(尤其是低温、高湿或腐蚀性气氛)下性能急剧下降。例如常规水凝胶在低温环境下会冻结失活,丧失弹性和导电能力。
五、研发难点、重点与前沿趋势
1. 新材料设计与开发:
- 复合材料与异质结构:通过构建多层膜结构(如MP/CP双层膜)或采用多相复合策略(如LM-MMT5、Sm-PMN-PT/PDMS),整合不同材料的优势,实现传感性能的协同增强或赋予材料全新功能。
- 仿生与生物启发材料:借鉴自然界感知机制,例如人体皮肤的工作原理,发展具备智能响应特性的材料。北京理工大学研发的抗冻水凝胶即受“局部促进成核并限制生长”机制启发而设计。
- AI驱动材料发现:结合机器学习模型与高通量计算手段,加速筛选和预测具有潜力的新型敏感材料及柔性电极体系,显著提升材料研发效率。
2. 先进加工与集成工艺:
- 精细化图案化技术:推动高分辨率打印技术(如基于LM-MMT墨水的打印)和光刻方法在柔性基底上的应用,以实现更高密度、更精确的传感器阵列制造。
- 异质异构集成:探索将多种材料、功能单元以及不同尺度的传感元件与机器人本体结构、执行机构、能源系统等进行共形集成,迈向真正意义上的一体化智能系统。
3. 提升鲁棒性与可靠性:
- 适应恶劣环境:开发可在极端温度、湿度或多变条件下稳定运行的材料体系,例如北理工研制的抗冻水凝胶或温度不敏感型传感纱线。
- 延长服役寿命:深入分析材料在循环载荷与复杂环境耦合作用下的退化行为,通过结构优化或表面改性手段提高其耐久性与抗疲劳能力。
4. 智能处理与数据融合:
- 硬件层面:研究感算一体或近感计算架构,利用新型材料实现传感信号的本地预处理,减少对外部传输的依赖,降低延迟与能耗。
- 算法层面:结合深度学习技术(如卷积神经网络CNN),对来自多模态、高维度传感系统的数据进行高效解析,提升机器人对环境的理解与交互能力。
5. 标准化与开源生态建设:
参考ProTac团队开源设计理念,推进模块化接口、统一数据格式的标准化工作,有助于降低技术门槛,加快创新成果转化与产业落地进程。
3. 集成与制造的复杂性:
将具备不同功能的敏感材料、导电组件与封装材料高密度、高良率地集成于三维曲面或复杂几何结构中,面临巨大技术挑战。此外,部分新兴材料(如MXene3)尚缺乏成熟的大规模、低成本且均匀可控的制备工艺,制约了其实际应用推广。
4. 能耗与散热问题:
某些主动式传感方案,例如持续发射信号的毫米波雷达或结构光系统,以及需要恒定供电的敏感材料,容易引发较高的能量消耗与热量积累,这对移动机器人平台的能量管理与热控设计提出了更高要求。
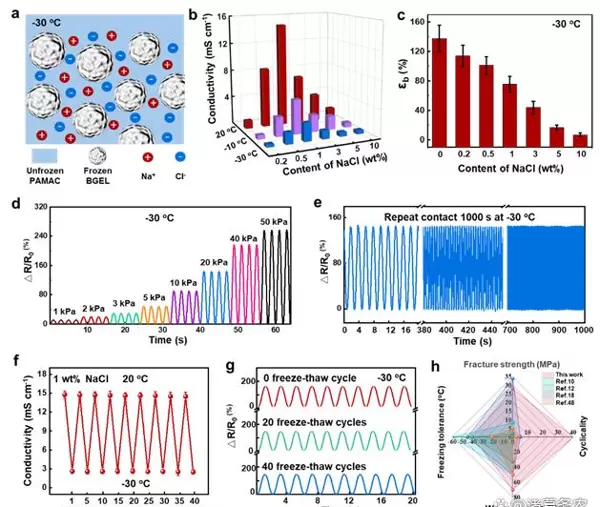
抗冻水凝胶的低温传感性能
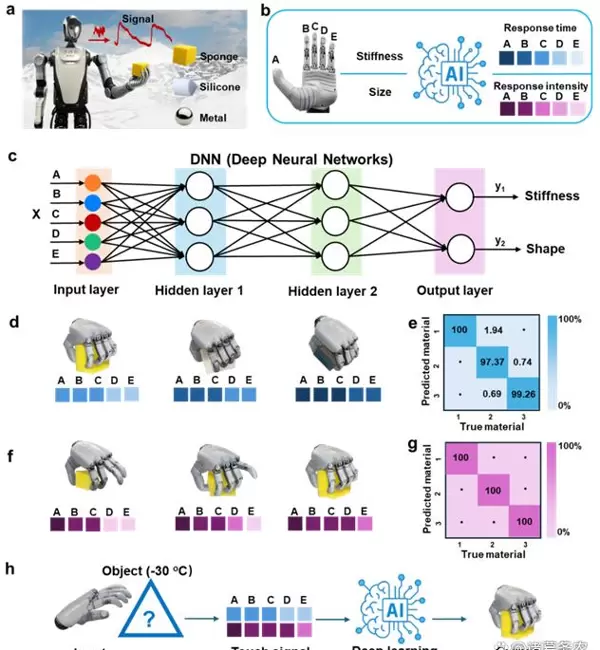
抗冻水凝胶在低温环境下实现物体软硬程度与尺寸识别的能力
结语:
非接触式传感技术的进步,本质上正由材料科学的发展所驱动。未来的关键突破,或将源于材料学家、机器人工程师与人工智能研究人员之间的深度协作。唯有跨领域融合,才能构建出真正能够“理解”世界,并与人类自然共存的智能机器人系统。
【免责声明】本文主要内容均源自公开资料和信息,部分内容引用了Ai。仅作参考,不作任何依据,责任自负。

 京公网安备 11010802022788号
京公网安备 11010802022788号







