


 雷达卡
雷达卡





重要信息
- 官网: https://ais.cn/u/zERJBf
- 时间: 2025年12月19日至21日
- 地点: 中国广州


征稿主题
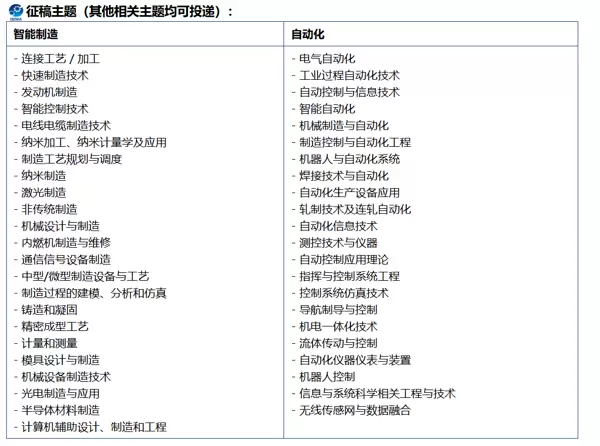
一、智能制造的核心技术体系
1.1 智能制造关键技术架构
智能制造依托多种先进技术的深度融合,实现对生产全过程的优化管理。其核心技术体系主要由以下几个模块构成:
| 技术模块 | 核心内容 | 典型应用 |
|---|---|---|
| 工业物联网 (IIoT) | 传感器网络、边缘计算、数据采集 | 设备状态监控、生产数据实时采集 |
| 工业机器人 | 协作机器人、运动控制、机器视觉 | 自动化装配、物料搬运、质量检测 |
| 数字孪生 | 虚拟建模、实时映射、仿真优化 | 生产线调试、设备维护预测 |
| 人工智能 | 机器学习、深度学习、强化学习 | 缺陷识别、工艺参数优化、智能调度 |
1.2 自动化系统的层级架构
自动化系统采用分层设计结构,从底层硬件到上层决策支持依次划分为以下层级:
- 现场设备层: 包括传感器、执行器和PLC等基础元件
- 控制层: 由SCADA系统与DCS系统组成,负责过程控制
- 管理层: 集成MES(制造执行系统)与ERP(企业资源计划),协调生产运营
- 决策层: 基于大数据分析平台与智能决策系统,支撑战略规划与优化
二、工业自动化的核心实践技术
2.1 运动控制与轨迹规划算法
工业机器人实现高精度动作的关键在于先进的轨迹规划方法。以下是一个基于Python语言的机器人路径插值示例代码:
python 运行import numpy as np def linear_interpolation(start_point, end_point, steps): """ 线性插值生成机器人运动轨迹点 :param start_point: 起始点坐标 [x, y, z] :param end_point: 终止点坐标 [x, y, z] :param steps: 插值步数 :return: 轨迹点列表 """ trajectory = [] for i in range(steps + 1): t = i / steps x = start_point[0] + t * (end_point[0] - start_point[0]) y = start_point[1] + t * (end_point[1] - start_point[1]) z = start_point[2] + t * (end_point[2] - start_point[2]) trajectory.append([x, y, z]) return np.array(trajectory) # 示例:生成从(0,0,0)到(10,5,3)的轨迹 start = [0, 0, 0] end = [10, 5, 3] trajectory = linear_interpolation(start, end, 20) print("机器人轨迹点:") print(trajectory)
2.2 机器视觉在质量检测中的实际应用
借助图像识别技术,机器视觉可高效完成产品缺陷的自动检测。下面展示一段使用OpenCV库进行缺陷识别的示例代码:
python 运行import cv2 import numpy as np def defect_detection(image_path, threshold=30): """ 基于图像差异的缺陷检测 :param image_path: 检测图像路径 :param threshold: 差异阈值 :return: 缺陷区域坐标 """ # 读取图像并转为灰度图 img = cv2.imread(image_path, 0) # 读取标准模板图像 template = cv2.imread('template.png', 0) # 计算图像差异 diff = cv2.absdiff(img, template) # 二值化处理 _, binary = cv2.threshold(diff, threshold, 255, cv2.THRESH_BINARY) # 查找缺陷轮廓 contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) defects = [] for contour in contours: area = cv2.contourArea(contour) if area > 100: # 过滤小面积噪声 x, y, w, h = cv2.boundingRect(contour) defects.append((x, y, w, h)) return defects # 缺陷检测示例 defects = defect_detection('product_image.png') print(f"检测到缺陷数量:{len(defects)}") for defect in defects: print(f"缺陷位置:x={defect[0]}, y={defect[1]}, 宽度={defect[2]}, 高度={defect[3]}")
三、智能制造系统的集成与性能提升
3.1 数字孪生技术的实施框架
数字孪生通过构建物理实体与虚拟模型之间的双向数据联动,推动生产流程持续优化。该系统主要包括以下四个层次:
- 数据采集层: 实时获取设备运行状态及各类传感器信息
- 模型构建层: 利用CAD/CAE工具建立三维虚拟模型,并进行多物理场仿真分析
- 交互层: 实现虚实数据同步更新,并提供可视化操作界面
- 应用层: 支持预测性维护、工艺改进以及故障诊断等功能
3.2 基于智能算法的生产调度实现
面对复杂的车间调度问题,可通过智能优化算法提升效率。例如,采用遗传算法进行任务排程的案例示意如下:
python 运行import numpy as np from deap import algorithms, base, creator, tools # 定义调度问题的适应度函数 def fitness(individual, job_times, machine_count): """ 计算调度方案的最大完工时间(Makespan) """ machine_times = [0] * machine_count for job_idx in individual: # 分配任务到机器 machine = np.argmin(machine_times) machine_times[machine] += job_times[job_idx] return (max(machine_times),) # 初始化遗传算法参数 creator.create("FitnessMin", base.Fitness, weights=(-1.0,)) creator.create("Individual", list, fitness=creator.FitnessMin) toolbox = base.Toolbox() job_count = 10 toolbox.register("indices", np.random.permutation, job_count) toolbox.register("individual", tools.initIterate, creator.Individual, toolbox.indices) toolbox.register("population", tools.initRepeat, list, toolbox.individual) toolbox.register("mate", tools.cxPartialyMatched) toolbox.register("mutate", tools.mutShuffleIndexes, indpb=0.05) toolbox.register("select", tools.selTournament, tournsize=3) # 定义作业时间和机器数量 job_times = [5, 3, 7, 2, 6, 4, 8, 3, 5, 4] machine_count = 3 toolbox.register("evaluate", fitness, job_times=job_times, machine_count=machine_count) # 运行遗传算法 population = toolbox.population(n=50) algorithms.eaSimple(population, toolbox, cxpb=0.7, mutpb=0.2, ngen=100, verbose=False) # 获取最优调度方案 best_ind = tools.selBest(population, 1)[0] best_makespan = fitness(best_ind, job_times, machine_count)[0] print(f"最优调度方案:{best_ind}") print(f"最小完工时间:{best_makespan}")
四、智能制造前沿发展趋势
4.1 工业元宇宙与智能制造的融合探索
工业元宇宙利用虚实结合的技术手段,打造沉浸式的工业生产环境,其主要应用场景包括:
- 虚拟调试: 在产线建设前期开展数字化验证,降低试错成本
- 远程运维: 实现跨地域的设备操控与维护,提升响应速度
- 员工培训: 构建虚拟仿真训练平台,提高培训效果与安全性
4.2 边缘智能在制造业中的部署优势
将人工智能算法下沉至边缘端设备,有助于实现本地化实时决策。其核心优势体现在:
- 低延迟: 数据无需上传云端,可在毫秒级内完成处理与响应
- 高可靠: 即使在网络不稳定或中断的情况下仍能独立运行
- 隐私保护: 敏感生产数据保留在本地,减少泄露风险
五、国际交流与合作发展机会
作为一项具有国际影响力的学术活动,本次会议将汇聚来自世界各地的研究人员与行业专家。参会者不仅能够发表最新研究成果、听取权威专家的主题报告,还可在圆桌讨论中与领域领军人物深入交流。这为拓展全球视野、建立国际合作网络提供了良好契机。对于高校师生而言,也是展示科研成果、积累学术资源的重要平台。


 京公网安备 11010802022788号
京公网安备 11010802022788号







