


 雷达卡
雷达卡



无刷直流电机BLDC神经网络PID控制方案
适用于课题研究与学习参考,内容涵盖以下核心部分:
- BLDC闭环控制的Simulink建模方法
- 基于神经网络PID的转速控制系统设计
- 双闭环结构:转速外环与电流内环协同控制策略
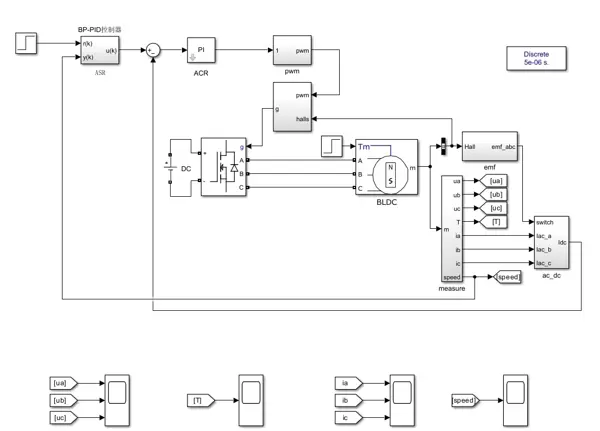
BLDC控制建模基础
构建无刷直流电机的控制系统在Simulink中类似于模块化搭建过程,关键在于准确实现霍尔信号检测与PWM驱动逻辑。其中,换相逻辑可通过S函数编程实现,确保六步换相顺序正确执行。
换相机制本质上是一个状态切换过程,依据霍尔传感器反馈的转子位置信息,动态调整逆变桥中六个功率管的导通状态,从而维持连续转矩输出。
function [sys,x0,str,ts] = bldc_commutation(t,x,u,flag)
switch flag
case 0
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 1;
sizes.NumOutputs = 6;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sys = simsizes(sizes);
x0 = [0];
str = [];
ts = [0.001 0];
case 3
hall = round(u);
sector = mod(floor((hall(1)*4 + hall(2)*2 + hall(3))/2),6)+1;
commutation_table = [1 0 0 0 0 1; % sector1
1 1 0 0 0 0; % sector2
0 1 0 0 1 0; % sector3
0 0 0 1 1 0; % sector4
0 0 1 1 0 0; % sector5
0 0 1 0 0 1]; % sector6
sys = commutation_table(sector,:)';
end传统PID控制的局限性
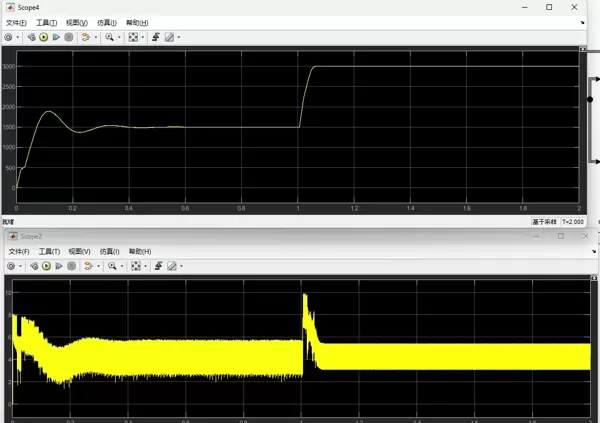
常规PID控制器在面对负载突变或系统参数漂移时表现欠佳,其固定参数难以适应动态工况变化,调参过程繁琐且效果不稳定,如同“直男式”响应——缺乏灵活性。
为此引入神经网络PID(NNPID)控制策略,利用神经网络在线自整定能力优化KP、KI、KD参数,显著提升系统鲁棒性与动态性能。
class NeuralPID(nn.Module):
def __init__(self):
super().__init__()
self.fc1 = nn.Linear(3,8) # 输入误差、积分、微分
self.fc2 = nn.Linear(8,3) # 输出Kp,Ki,Kd
def forward(self, x):
x = torch.tanh(self.fc1(x))
return torch.sigmoid(self.fc2(x)) * [5.0, 0.5, 0.1] # 归一化到实际参数范围神经网络PID的设计要点
NNPID结构通常采用三层前馈网络,形似“三明治”结构,输入层接收误差信号及其变化率,隐含层处理非线性映射,输出层生成实时PID参数。
训练阶段以误差平方和为损失函数,需在多种运行条件下采集数据,包括阶跃响应、负载扰动等典型场景,确保泛化能力。
实践表明,tanh激活函数优于ReLU,因其支持正负双向调节,更符合PID参数需上下浮动的特点。
双闭环控制架构实现
实际应用中推荐使用双闭环控制结构:
- 外环为转速环,采用神经网络PID进行智能调节;
- 内环为电流环,配置经典PI控制器实现快速响应;
- 转速设定值与反馈值之差送入NNPID模块;
- NNPID输出作为电流环的参考指令;
- 采样得到的相电流进入PI控制器;
- PI输出决定PWM占空比,驱动功率电路。
电流环PI参数无需复杂整定,可根据电机电阻与电感初估后微调即可。建议将电流环带宽设置为转速环的5至10倍,避免环路间耦合震荡。
若出现电机啸叫现象,可尝试将PWM载波频率提升至15kHz以上,有效抑制噪声与共振。
工程实施中的注意事项
- 霍尔传感器安装角度偏差可能导致换相时刻抖动,建议使用高精度编码器进行标定校准;
- 神经网络应采用离线训练方式完成模型构建,避免在线训练带来的实时性压力;
- 双闭环系统应设置不同采样周期:电流环不低于1kHz,转速环200Hz可满足多数需求;
- 过流保护必须包含硬件层级设计,软件保护存在延迟风险,易导致功率器件损坏。
总结
完成上述控制系统搭建后可以发现,BLDC控制如同骑行自行车——一旦掌握平衡原理,后续只需微调姿态即可稳定运行。整个系统的关键在于各模块协调配合与参数合理匹配。

 京公网安备 11010802022788号
京公网安备 11010802022788号







