


 雷达卡
雷达卡



最近在研究线控转向技术的过程中,接触到了一种基于CarSim与Simulink的联合仿真动力学模型。该模型不包含电机物理部分,主要用于车辆转向系统的动态行为分析。今天就来详细聊聊这个模型的结构与功能。
模型组成说明
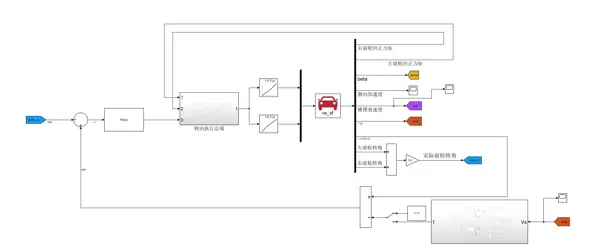
该联合仿真系统由多个关键模块构成,核心部分为定横摆角速度增益下的变传动比控制模块,同时集成了CarSim的输入输出Cpar参数文件接口。整个模型属于动力学层级,未涉及电机执行器的物理建模,因此更适合用于上层控制策略的验证与性能评估。
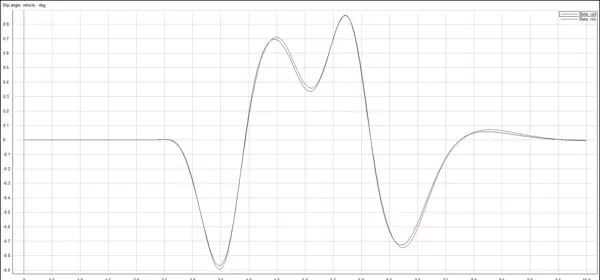
其中,变传动比模块的作用尤为关键。它依据车辆当前的行驶状态,特别是车速等参数,实时调整转向传动比,从而优化转向响应特性。例如,在低速工况下增大传动比,可使驾驶员操作更轻便;而在高速行驶时减小传动比,则有助于抑制过度转向,提升行驶稳定性。
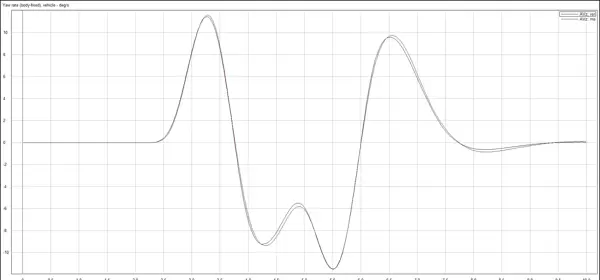
设想一下,若在高速状态下仍保持较大的转向传动比,轻微的方向盘转动就可能引发剧烈的车辆方向变化,存在安全隐患。而通过定横摆角速度增益设计的变传动比逻辑,能有效规避此类问题。虽然实际实现依赖于Simulink中的复杂模块配置,但其基本原理可通过简化代码形式表达如下(以Python类比逻辑):
speed = 60 # 假设车速为60km/h
if speed < 30:
ratio = 15 # 低速时传动比设为15
else:
ratio = 10 # 高速时传动比设为10
print(f"当前车速下的转向传动比为: {ratio}")当然,真实系统中还需综合考虑侧向加速度、方向盘转角速率、路面附着系数等多种因素,控制算法也更为精细,但总体思路依然是基于多变量反馈进行传动比的动态调节。
CarSim接口与参数配置机制
Cpar文件作为CarSim与Simulink之间的数据交互载体,承担了模型参数定义的核心任务。这些文件记录了车辆的关键物理属性,如整车质量、前后轴距、悬挂刚度、轮胎模型参数等。通过修改Cpar文件内容,用户可以在不更改主模型结构的前提下,快速切换不同车型或测试多种配置方案。
在Simulink环境中调用CarSim模型时,通常会借助S函数或专用接口模块完成数据传递。以下为一个简化的示意性代码片段,展示如何通过Matlab S函数读取Cpar相关参数并实现仿真过程中的输入输出处理:
function [sys,x0,str,ts] = sfun_tank(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
end
function sys=mdlOutputs(t,x,u)
% 这里u可以理解为从Cpar文件获取的参数信息
output = u * 2; % 简单处理,实际可能是复杂的车辆动力学计算
sys = [output];
end尽管示例代码仅为框架性描述,但它揭示了联合仿真中模型间信息流动的基本流程:从参数读取、状态更新到结果输出,各环节紧密耦合,确保仿真结果的准确性与一致性。实际工程应用中的实现将更加复杂,涵盖完整的车辆动力学方程求解与实时同步机制。
使用说明与注意事项
需要特别强调的是,该模型仅限参考用途,不得用于商业开发、产品验证或其他未经授权的应用场景。这一限制可能是出于知识产权保护或模型适用范围的考量。任何仿真模型都建立在特定假设基础之上,超出其设计边界使用可能导致结果失真,甚至误导研发决策。
因此,在使用过程中应严格遵守使用规范,聚焦于学术研究或技术探索目的。正确理解模型结构、掌握其运行逻辑,才能充分发挥其在车辆动力学分析、控制算法验证等方面的价值。
总体而言,线控转向系统结合CarSim与Simulink的联合仿真平台,为研究人员提供了一个高效且灵活的动力学测试环境。通过对变传动比策略与参数化建模机制的深入剖析,有助于推动智能转向控制技术的发展与优化。

 京公网安备 11010802022788号
京公网安备 11010802022788号







