


 雷达卡
雷达卡



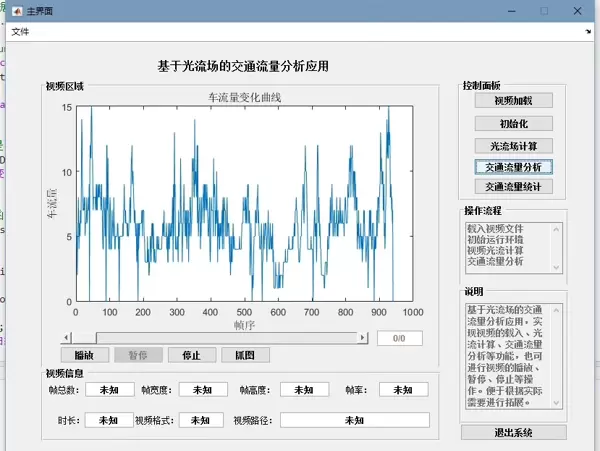
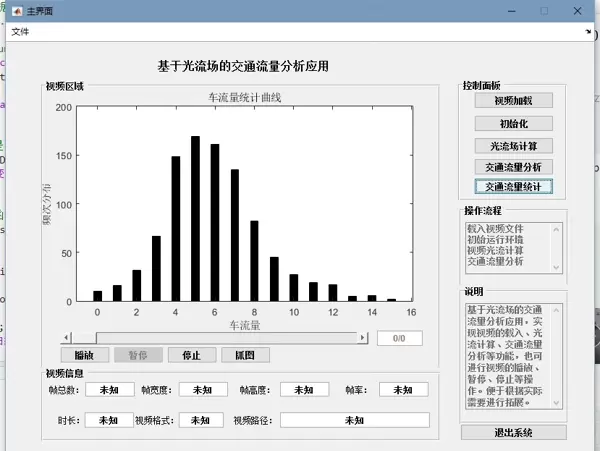
Matlab 实现基于光流场的交通流量分析与运动目标检测
随着智能交通系统的快速发展,对交通流量进行精确监测变得愈发重要。利用光流场技术,可以有效识别视频中的运动目标,如车流或人流,为交通管理提供数据支持。本文将介绍其基本原理,并展示如何使用 Matlab 完成相关算法实现。
光流法的基本原理
光流描述的是图像序列中像素点在时间维度上的运动变化,可理解为“亮度模式的流动”。它能够反映场景中物体的运动方向和速度。通过分析连续帧之间的光流分布,即可判断出哪些区域存在运动目标。
光流方法依赖一个核心假设:在短时间内,图像中某一点的灰度值保持不变。设图像在时刻 $t$ 的亮度为 $I(x, y, t)$,经过微小时间 $\Delta t$ 后,该点移动至 $(x + \Delta x, y + \Delta y)$,则有:
\[ I(x, y, t) = I(x + \Delta x, y + \Delta y, t + \Delta t) \]对该式进行泰勒展开并忽略高阶项,整理后可得光流的基本约束方程:
\[ \frac{\partial I}{\partial x}u + \frac{\partial I}{\partial y}v + \frac{\partial I}{\partial t} = 0 \]其中 $u = \frac{\Delta x}{\Delta t}$、$v = \frac{\Delta y}{\Delta t}$ 分别表示光流在水平和垂直方向的分量。由于这是一个包含两个未知数的单一方程,无法直接求解,因此需要引入额外约束条件。
HS 光流法详解
Horn-Schunck(简称 HS)方法是一种广泛应用的全局光流计算模型。它在原有约束基础上增加了光流场的平滑性假设,即相邻像素间的光流变化应尽可能连续和平缓。
为此,HS 方法构建了一个能量函数 $E$,由两部分构成:

- 数据项:衡量光流方程的拟合程度,表达式为: \[ E_d = \sum_{x,y}\left(\frac{\partial I}{\partial x}u + \frac{\partial I}{\partial y}v + \frac{\partial I}{\partial t}\right)^2 \]
- 平滑项:保证光流场的空间一致性,定义如下: \[ E_s = \alpha^2 \sum_{x,y} \left( \left(\frac{\partial u}{\partial x}\right)^2 + \left(\frac{\partial u}{\partial y}\right)^2 + \left(\frac{\partial v}{\partial x}\right)^2 + \left(\frac{\partial v}{\partial y}\right)^2 \right) \]
总能量函数为两者之和:
\[ E = E_d + E_s \]通过变分法最小化该能量函数,可迭代求解出每个像素点的光流分量 $u$ 和 $v$,从而获得完整的光流场。
Matlab 程序实现流程
以下是一个基于 HS 光流法的简易 Matlab 实现框架,适用于任意运动目标检测任务,包括交通流、行人等视频内容。
1. 视频读取与初始化
首先加载待处理的视频文件,并获取总帧数以便后续逐帧处理:
videoFileReader = VideoReader('your_video_file.mp4');
numFrames = videoFileReader.NumberOfFrames;
VideoReader该步骤利用 Matlab 内置的 VideoReader 类完成视频解析,确保兼容多种常见格式。
2. 光流参数设置
设定 HS 算法的关键参数:
alpha = 0.012; % 平滑系数
nIter = 10; % 迭代优化次数
alpha参数 alpha 控制光流场的平滑程度——值越小,结果越平滑,但可能损失局部细节;nIter 决定迭代优化的轮数,影响精度与计算效率。
nIter3. 帧间处理循环
对视频中的每一对连续帧执行光流计算:
for k = 1:numFrames - 1
% 读取当前帧与下一帧
frame1 = read(videoFileReader, k);
frame2 = read(videoFileReader, k + 1);
% 转换为灰度图像
gray1 = rgb2gray(frame1);
gray2 = rgb2gray(frame2);
% (后续调用 HS 光流算法计算 u, v)
end
此循环结构实现了从原始彩色视频到灰度序列的转换,为光流计算做好准备。实际应用中可在内部集成自定义的 HS 光流求解模块,提取运动矢量场。
% 读取视频
videoFileReader = VideoReader('your_video_file.mp4');
numFrames = videoFileReader.NumberOfFrames;
% 初始化光流参数
alpha = 0.012; % 平滑参数
nIter = 10; % 迭代次数
for k = 1:numFrames - 1
% 读取当前帧和下一帧
frame1 = read(videoFileReader, k);
frame2 = read(videoFileReader, k + 1);
% 将帧转换为灰度图
gray1 = rgb2gray(frame1);
gray2 = rgb2gray(frame2);
% 计算图像梯度
[Ix, Iy, It] = computeGradient(gray1, gray2);
% 初始化光流
u = zeros(size(gray1));
v = zeros(size(gray1));
for iter = 1:nIter
% 计算光流的平滑项
ux = imfilter(u, [-0.25 0 0.25], 'conv','replicate');
uy = imfilter(u, [-0.25; 0; 0.25], 'conv','replicate');
vx = imfilter(v, [-0.25 0 0.25], 'conv','replicate');
vy = imfilter(v, [-0.25; 0; 0.25], 'conv','replicate');
% 更新光流
denominator = Ix.^2 + Iy.^2 + alpha^2 * (ux.^2 + uy.^2 + vx.^2 + vy.^2);
u = (Iy.^2 * u - Ix.* Iy.* v - Ix.* It)./ denominator;
v = (-Ix.* Iy.* u + Ix.^2 * v - Iy.* It)./ denominator;
end
% 这里可以根据光流结果进行运动目标检测相关操作,比如设定阈值筛选明显运动的区域
% 简单可视化光流
figure;
imagesc(frame1);
hold on;
[X, Y] = meshgrid(1:size(u, 2), 1:size(u, 1));
quiver(X, Y, u, v, 'r');
hold off;
end
function [Ix, Iy, It] = computeGradient(im1, im2)
% 使用高斯滤波器平滑图像
im1 = imgaussfilt(im1, 1.5);
im2 = imgaussfilt(im2, 1.5);
% 计算x和y方向的梯度
Ix = imfilter(im1, [-0.25 0 0.25], 'conv','replicate');
Iy = imfilter(im1, [-0.25; 0; 0.25], 'conv','replicate');
% 计算时间方向的梯度
It = im2 - im1;
end整个流程适用于各类动态场景的运动分析,具备良好的通用性和扩展性。
该算法通过逐帧读取视频数据,每次连续获取两帧图像(当前帧与下一帧),并将其转换为灰度图像。由于光流法通常在灰度空间中进行计算,这种处理方式既能有效降低计算复杂度,又不会丢失关键的运动信息。
gray2 = rgb2gray(frame2);
梯度计算函数实现
以下为用于计算图像空间和时间梯度的 MATLAB 函数:
function [Ix, Iy, It] = computeGradient(im1, im2)
% 使用高斯滤波对图像进行平滑处理
im1 = imgaussfilt(im1, 1.5);
im2 = imgaussfilt(im2, 1.5);
% 计算 x 和 y 方向的空间梯度
Ix = imfilter(im1, [-0.25 0 0.25], 'conv','replicate');
Iy = imfilter(im1, [-0.25; 0; 0.25], 'conv','replicate');
 % 时间维度上的梯度由两帧图像相减得到
It = im2 - im1;
end
% 时间维度上的梯度由两帧图像相减得到
It = im2 - im1;
end
首先调用高斯滤波函数对输入图像进行预处理,以削弱噪声干扰。随后利用类似 Sobel 算子的卷积核模板,通过 imfilter 函数分别提取图像在水平和垂直方向的空间梯度分量。而时间方向的梯度则直接采用前后两帧灰度图之差来估算。
imgaussfiltimfilter光流场迭代更新过程
核心迭代部分依据 Horn-Schunck 模型的能量最小化原理,逐步优化光流场估计值:
for iter = 1:nIter
% 计算光流场 u 和 v 在空间上的梯度(平滑项)
ux = imfilter(u, [-0.25 0 0.25], 'conv','replicate');
uy = imfilter(u, [-0.25; 0; 0.25], 'conv','replicate');
vx = imfilter(v, [-0.25 0 0.25], 'conv','replicate');
vy = imfilter(v, [-0.25; 0; 0.25], 'conv','replicate');
% 更新光流向量 u 和 v
denominator = Ix.^2 + Iy.^2 + alpha^2 * (ux.^2 + uy.^2 + vx.^2 + vy.^2);
u = (Iy.^2 .* u - Ix .* Iy .* v - Ix .* It) ./ denominator;
v = (-Ix .* Iy .* u + Ix.^2 .* v - Iy .* It) ./ denominator;
end
在每一次迭代中,系统首先对当前光流场 u 和 v 进行空间梯度计算,作为正则化平滑项。然后结合已知的图像梯度 Ix、Iy 和 It,按照 HS 模型的解析公式同步更新每个像素点的光流矢量,使整体能量函数趋于最小。
结果可视化方法
为了直观展示计算所得的光流场分布,程序使用如下代码进行图形绘制:
figure;
imagesc(frame1);
hold on;
[X, Y] = meshgrid(1:size(u, 2), 1:size(u, 1));
quiver(X, Y, u, v, 'r');
hold off;
该部分将第一帧图像作为背景显示,并利用 meshgrid 构建坐标网格,再通过 quiver 函数叠加绘制红色箭头,形象地表示各位置处的光流方向与大小。
quiver上述流程完整实现了基于 Horn-Schunck 光流法的运动分析框架,适用于多种动态场景视频,包括车流、人流等目标的运动检测。所构建的光流场不仅反映了物体移动趋势,也为后续智能交通系统的流量统计、行为识别等高级应用提供了可靠的数据支持。

 京公网安备 11010802022788号
京公网安备 11010802022788号







