


 雷达卡
雷达卡



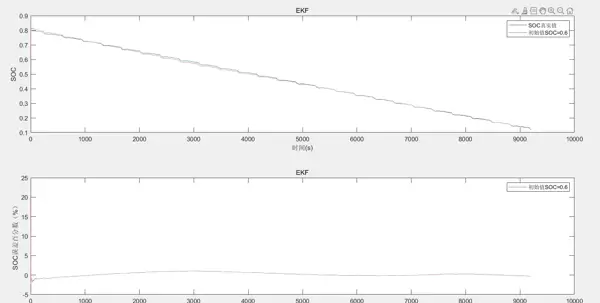
最近在进行锂电池SoC估算相关的项目时,发现扩展卡尔曼滤波(EKF)是一种非常有效的算法。相比传统安时积分法会累积误差、开路电压法无法实时测量的问题,EKF能够有效融合两者优势,实现更精确的实时状态估计。本文将详细介绍如何基于MATLAB/Simulink搭建用于锂电池SoC估算的EKF仿真模型,并分享关键参数调试的经验与避坑建议。
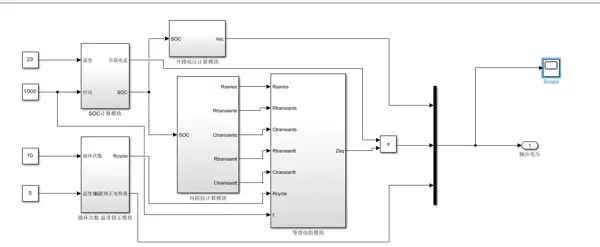
首先,电池等效电路模型的选择至关重要。目前应用较广的是二阶RC等效电路模型,因其在计算复杂度和建模精度之间取得了良好平衡。该模型可在Simulink中构建如下结构:
% 电池模型参数定义
R0 = 0.01; % 欧姆内阻
Rp1 = 0.005; % 极化电阻1
Cp1 = 2000; % 极化电容1
Rp2 = 0.008; % 极化电阻2
Cp2 = 1500; % 极化电容2function [x_k, F_k] = stateFcn(x_prev, I, deltaT, Cn)
x_k = x_prev - (deltaT/Cn)*I; % SoC状态递推
F_k = 1; % 状态转移矩阵雅可比
endfunction [V_est, H_k] = measFcn(x_k, I, R0, Rp1, Cp1, Rp2, Cp2)
ocv = 3.7 + 0.6*x_k - 0.2*exp(-15*x_k); % 典型OCV拟合公式
V_est = ocv - I*(R0 + Rp1/(1+Rp1*Cp1) + Rp2/(1+Rp2*Cp2));
H_k = 0.6 + 3*exp(-15*x_k); % 对SoC求导得到观测矩阵
end
 京公网安备 11010802022788号
京公网安备 11010802022788号







