


 雷达卡
雷达卡



基于自适应模型预测控制(MPC)的无人驾驶汽车轨迹跟踪控制算法,基于MATLAB/simulink仿真,包含slx文件,支持MATLAB2018及以上版本,允许修改代码,使用S-Function函数编写。
模型预测控制MPC轨迹跟踪控制模型具备以下功能:
- 设置参考轨迹并进行跟踪;
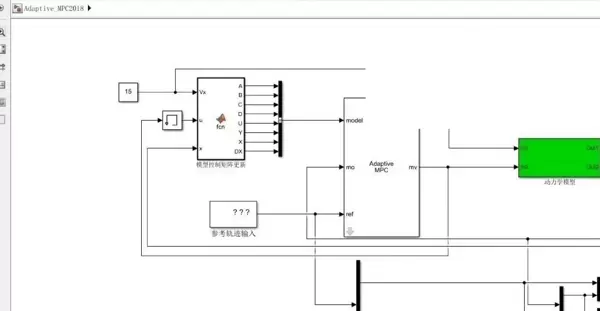
- 基于模型预测控制的车辆轨迹跟踪模型;
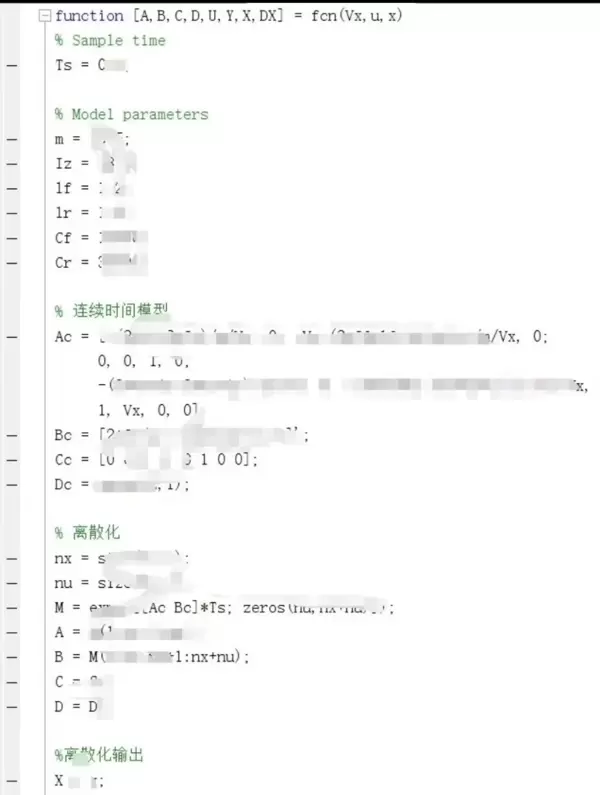
- 可调节控制矩阵ABCD的方式;
- 二自由度车辆动力学模型;
- 模型预测控制模型。
随附学习资料和简明的模型说明文档。
一、引言
随着无人驾驶技术的迅速发展,模型预测控制(MPC)已成为轨迹跟踪控制算法的关键选项。本文将介绍一种基于自适应模型预测控制的无人驾驶汽车轨迹跟踪控制算法,该算法在MATLAB/Simulink环境中进行仿真,支持MATLAB 2018及以上版本,并提供学习资料和模型说明文档。
二、参考轨迹设置与跟踪
本算法支持用户自定义参考轨迹,涵盖路径、速度和加速度等参数。通过设定参考轨迹,算法能实时计算并调整车辆的行驶状态,确保精准的轨迹跟踪。
三、基于模型预测控制的车辆轨迹跟踪模型
车辆轨迹跟踪模型采用了基于模型预测控制的算法,通过预测未来时刻车辆的状态,实现对目标轨迹的精准跟踪。模型依据车辆的当前状态、路况等信息,计算出最佳的控制指令,确保车辆的精准操控。
四、控制矩阵ABCD的调节方式
本算法支持对控制矩阵ABCD的调节方法。用户可根据实际需求,通过调整矩阵参数,优化车辆的动力性能。此调节方式能适应各种路况和驾驶需求,增强车辆的适应性和稳定性。
五、二自由度车辆动力学模型
本算法采用二自由度车辆动力学模型,该模型能准确描绘车辆的横向和纵向运动。通过构建车辆动力学模型,算法能更精准地计算车辆的行驶状态和控制指令,提升轨迹跟踪的精度和稳定性。
六、模型预测控制模型
本算法采用模型预测控制(MPC)进行轨迹跟踪控制。MPC算法通过在线优化策略,预测并控制未来时刻车辆的状态,实现对目标轨迹的精准跟踪。本算法的MPC模型具备自适应能力,能根据路况和车辆状态的变化,实时调整控制策略,确保车辆的稳定性和安全性。
七、仿真与学习资源
本算法在MATLAB/Simulink环境中进行仿真,支持MATLAB 2018及以上版本。用户可通过修改代码,实现自定义的轨迹跟踪控制策略。此外,我们还提供了学习资料和模型说明文档,帮助用户更好地理解和应用本算法。
八、结论
本文介绍了一种基于自适应模型预测控制的无人驾驶汽车轨迹跟踪控制算法。该算法具备参考轨迹设置与跟踪、基于模型预测控制的车辆轨迹跟踪模型、控制矩阵ABCD的调节方式、二自由度车辆动力学模型以及模型预测控制模型等特性。通过MATLAB/Simulink仿真,用户可以实现对无人驾驶汽车的精准控制和轨迹跟踪。同时,提供的学习资料和模型说明文档有助于用户更好地理解和应用本算法。

 京公网安备 11010802022788号
京公网安备 11010802022788号







